zł43.93 tax excl.
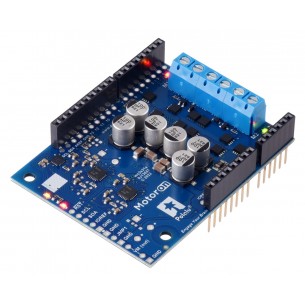
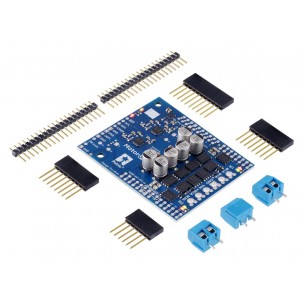
Pololu 2512Module with 2-channel DC motor driver for Arduino boards. It allows you to control drives with a supply voltage from 6 to 32 V and a current consumption of up to 0.65 A. Pololu 2512

free shipping in Poland for all orders over 500 PLN

If your payment will be credited to our account by 11:00

Each consumer can return the purchased goods within 14 days
Module with 2-channel DC motor driver dedicated to Arduino boards. It allows you to control drives with a supply voltage from 6 to 32 V and a current consumption of up to 0.65 A. The built-in current control function limits the maximum instantaneous motor current to about 0.9 A per channel, making the module well suited for low-current high-voltage motors. The controller is equipped with protection against reverse polarity, overheating, short circuit and over voltage. The user has at his disposal the Arduino library, which makes it much easier to start working with the kit.
Board with ATmega2560 microcontroller (256 kB Flash, 8 kB RAM, 4 kB EEPROM) clocked at 16 MHz. USB-UART converter based on the ATmega16u2 chip. The user has at his disposal, among others: 54 I/O lines, 14 PWM channels, 16 analog inputs.
Microcontroller board based on the ATmega32u4
Arduino Uno Rev3 is a popular board with Atmel ATmega328 microcontroller from the AVR family, there are 14 I / O lines, 6 PWM channels and 6 analog inputs. The additional ATmega16U4 microcontroller realizes communication via the USB interface. Arduino A000066
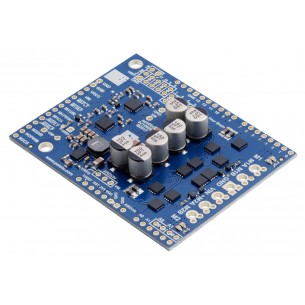
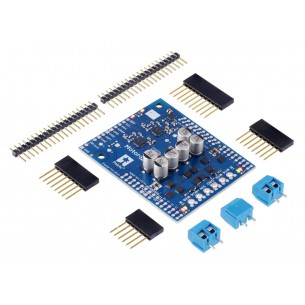
DC motor controller that allows the movement of three drives to be controlled via an I2C interface. Board with soldered connectors included. Pololu 5068
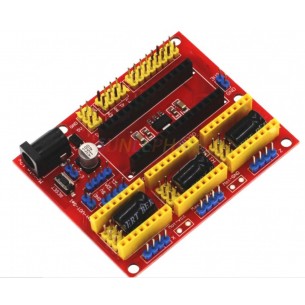
Expansion board for three stepper motor drivers compatible with Arduino Nano. The stepper driver connectors fit A4988 modules
No product available!
This shield makes it easy to control two high-power DC motors with your Arduino or Arduino-compatible board. Its twin discrete MOSFET H-bridges support a wide 6.5 V to 30 V operating range and are efficient enough to deliver a continuous 18 A without a heat sink.
DRV8825 Stepper Motor Driver Module for Arduino. It allows you to control two drives, equipped with an XBee connector. DFRobot DRI0023
SimpleFOC brushless motor driver module dedicated to Arduino boards. SimpleFOC Shield v2.0.4
No product available!
Shield with dual-channel DC motor driver for Arduino. It has an operating voltage from 7 to 30 V and a continuous current of up to 10 A. It can be controlled by a PWM signal or by means of built-in buttons. Cytron SHIELD-MDD10
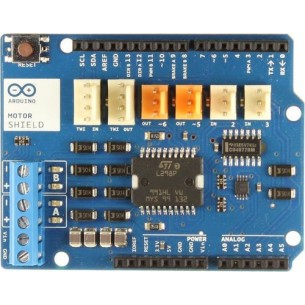
Dual-channel electric motors controller (H-bridge) Arduino Motor Shield Rev3 with L298 for controlling two DC motors or one stepper motor with the possibility of using an electronic brake.
Two axis stepper motor driver expansion board based on the L6470 for STM32 Nucleo
Two-channel DC motor driver designed to work with Arduino boards. The module is based on the H L298 bridge system. It can control two DC motors up to 2 A per channel. SparkFun DEV-14129
No product available!
(DRI0009) 2A Motor Shield For Arduino
DC motor driver that allows you to control the movement of two drives using the I2C interface. Board with soldered connectors. Pololu 5039
No product available!
DC motor driver that allows you to control the movement of two drives using the I2C interface. Board with soldered connectors. Pololu 5040
No product available!
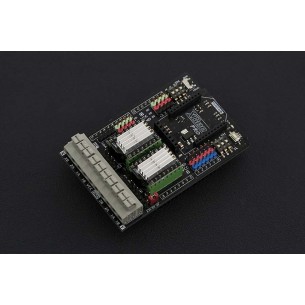
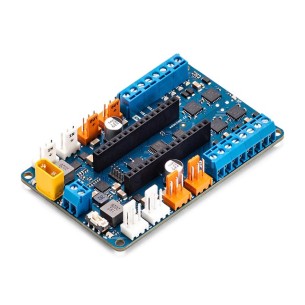
Nano Motor Carrier to moduł rozszerzeń przeznaczony do Arduino Nano 33 IoT, który został zaprojektowany, aby ułatwić sterowanie silnikami. Pozwala na kontrolowanie ruchu czterech silników prądu stałego, ale można go również wykorzystać do podłączenia serwomechanizmów i czujników. Arduino ABX00041
No product available!
No product available!
DC motor driver that allows you to control the movement of three drives using the I2C interface. Board with soldered connectors. Pololu 5030
No product available!
DC motor driver that allows you to control the movement of two drives using the I2C interface. Board with connectors for self-assembly. Pololu 5043
No product available!
Pololu 2512Module with 2-channel DC motor driver for Arduino boards. It allows you to control drives with a supply voltage from 6 to 32 V and a current consumption of up to 0.65 A. Pololu 2512