- dwukanałowy sterownik silników DC")
 - dwukanałowy sterownik silników DC")
 - dwukanałowy sterownik silników DC")
 - dwukanałowy sterownik silników DC - widok od góry")
 - dwukanałowy sterownik silników DC - widok od spodu")

zł660.49 tax excl.
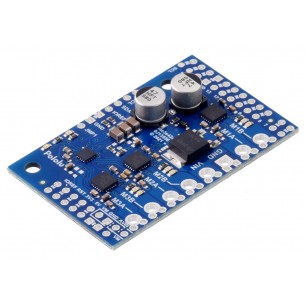
The RoboClaw motor controllers from Basicmicro (formerly Ion Motion Control) can control a pair of brushed DC motors using USB serial, TTL serial, RC or analog inputs. This version can supply a continuous 15 A per channel (30 A peak) and operates up to 34 V.

free shipping in Poland for all orders over 500 PLN

If your payment will be credited to our account by 11:00

Each consumer can return the purchased goods within 14 days
The RoboClaws from Basicmicro (formerly Ion Motion Control) are a family of efficient, versatile, synchronous regenerative motor controllers. They can supply brushed DC motors with 7.5 A, 15 A, 30 A, 45 A, 60 A, or 120 A continuous (depending on the model) at voltages from 6 V to 34 V or 10.5 V to 60 V (also depending on the model), and they allow for peak currents well above the maximum continuous ratings. The “Solo” versions feature a single motor control channel while the dual versions (denoted by a “2x” in their names) offer two channels for controlling a pair of motors.
| Solo 30A | Solo 60A | 2x7A | 2x15A | 2x30A | 2x45A ST 2x45A | 2x60A | 2x60AHV | 2x160A | ||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Motor channels: | 1 | 2 | 2 | |||||||||||
| Operating voltage: | 6 V to 34 V | 6 V to 34 V | 10.5 V to 60 V | |||||||||||
| Continuous output current: | 30 A | 60 A | 7.5 A | 15 A | 30 A | 45 A | 60 A | 60 A | 120 A | |||||
| Peak output current: | 60 A | 120 A | 15 A | 30 A | 60 A | 60 A | 120 A | 120 A | 160 A | |||||
| 5V BEC(1) max current: | 1.2 A | 1.2 A (V5B or later) | 3 A | 3 A | ||||||||||
| Size: | 60 × 32.5 × 23.5 mm | 48 × 42 × 17 mm | 74 × 52 × 17 mm | 100 × 86 × 30 mm | 100 × 86 × 30 mm | 212 × 126 × 50 mm | ||||||||
| Weight: | 130 g | 18 g | 60 g | 295 g | 295 g | 1630 g | ||||||||
1 Battery Eliminator Circuit
The RoboClaws have a USB interface that acts as a virtual serial (COM) port, allowing it to be controlled directly from a computer, and they feature built-in commands for controlling acceleration, deceleration, distance, speed, current sense, voltage limits and more. Several other interface modes are supported by the RoboClaw as well: it can be controlled via TTL serial for use with embedded systems, RC hobby servo pulses for use as an RC-controlled electronic speed control (ESC), or analog voltages for use with potentiometers or analog joysticks.
RoboClaw automatically supports 3.3V or 5V logic levels, travel limit switches, home switches, emergency stop switches, power supplies, braking systems and contactors. Power supplies can be used by enabling the built in voltage clamping control feature. A built-in switching mode BEC supplies 5VDC at up to 1.2 A or 3 A (depending on controller model) for powering user devices.
The RoboClaws can be operated without feedback for open-loop speed control, or they can be used with a variety of feedback types for closed-loop speed or position control. Quadrature encoders with up to 19.6 million pulses per second are supported and can be auto tuned using Ion Studio, which is a free downloadable application. In addition, a wide range of sensor inputs such as potentiometers and absolute encoders are supported. RoboClaw’s closed loop functionality creates absolute control over speed and direction regardless of load changes.
RoboClaw incorporates several protection features including temperature, current, over voltage and under voltage limits. Several user definable settings such as maximum current limit, maximum and minimum battery voltages are provided for more refined control.
This RoboClaw 2x15A (V5D or V5E) is a slightly improved replacement for the 2x15A (V5). Specifically, the V5D has a protective plastic plate on the bottom and includes a port for optionally connecting a 5 V, 150 mA cooling fan that the RoboClaw will automatically control based on the board temperature, and V5E is a minor change over V5D that does not affect performance. The board size is the same and the locations of the key interface elements (e.g. buttons, terminal blocks, header pins, USB connector, and mounting holes) are unchanged, allowing this version to be used as a direct replacement for the V5 in typical applications. As of 14 Feb 2018, we are now shipping version V5E instead of V5D for item #3285.
This RoboClaw features a USB Micro-B connector that works with USB micro-B cables.
| Motor channels: | 2 |
|---|---|
| Control interface: | USB; non-inverted TTL serial (2-way); RC servo pulses; analog voltage1 |
| Minimum operating voltage: | 6 V |
| Maximum operating voltage: | 34 V |
| Continuous output current per channel: | 15 A |
| Peak output current per channel: | 30 A |
| Size: | 2.1″ × 2.9″ × 0.9″ |
|---|---|
| Weight: | 60 g |
Data sheet
The RoboClaw motor controller can control a pair of brushed DC motors using USB serial, TTL serial, RC or analog inputs. Integrated dual quadrature decoders make it easy to create a closed-loop speed control system. This version can supply a continuous 7.5 A per channel (15 A peak). Pololu 3284
No product available!
No product available!
KAmodMPC17C724 is a module with a double MP bridge bridge type MPC17C724. The system allows you to control two DC brush motors or one bipolar stepping motor. The controller operates at a voltage range of 2.7 - 5.5 V and can work with motors with power consumption up to 0.4 A.
Brushless DC motor driver (BLDC) with speed regulation by potentiometer or PWM signal. It can operate motors powered with the voltage from 6 to 60 V with a current consumption of up to 16 A
No product available!
DC motor driver that allows you to control the movement of three drives using the I2C interface. Plate with connectors for assembly. Pololu 5031
No product available!
Module with TMC2208 stepper motor driver. It enables control with a supply voltage ranging from 5.5 to 34 V and a current of up to 1,2 A
DC motor driver that allows you to control the movement of three drives using the I2C interface. Connectors for self-assembly. Pololu 5034
DC motor driver that allows you to control the movement of three drives using the I2C interface. The set includes only the board without connectors. Pololu 5032
No product available!
Two-channel driver of direct current (DC) motors with a working voltage from 7 to 30 V and a maximum continuous current of 10 A. It can be controlled by a PWM signal or by buttons. Cytron MDDRC10
Brushless motor driver dedicated to Arduino. It can handle drives with a control voltage from 9 V to 24 V DC and provide currents up to 20 mA. Seeed Studio 105030027
No product available!
Module with 2-channel DC motor driver DRV8833 designed to work with the Raspberry Pi Pico. It can work with a voltage from 2.7 to 10.8 V and a current of up to 1.2 A. Pimoroni PIM617
Dual motor controller allowing two DC motors to be driven with voltages from 4.5 to 13.5V and a continuous current of 1.2 A per channel. SparkFun ROB-14450
Module with a 2-channel DC motor driver TB6612FNG designed to work with micro: bit. It can also control 3 servos. SB Components 14897
Shield with dual-channel DC motor driver for Arduino. It has an operating voltage from 7 to 30 V and a continuous current of up to 1.2 A. It can be controlled by a PWM signal or by means of built-in buttons. Cytron SHIELD-3AMOTOR
Brushless motor driver module (ESC regulator) with current efficiency up to 20 A. Uses BLHeli_S software
No product available!
Compact stepper motor controller with the TMC2208 system with an operating voltage from 4.75 to 36 V. It offers smooth, quiet operation, high efficiency, various operating modes and easy configuration. It is controlled via the STEP/DIR interface and is an ideal solution for 3D printers and similar applications. BIGTREETECH TMC2208 V3.0
No product available!
The RoboClaw motor controllers from Basicmicro (formerly Ion Motion Control) can control a pair of brushed DC motors using USB serial, TTL serial, RC or analog inputs. This version can supply a continuous 15 A per channel (30 A peak) and operates up to 34 V.