zł65.16 tax excl.
Linear potentiometer with force sensor. It has an analog output, it allows you to detect where and with what force the sensor strip has been pressed. Pololu 2729

free shipping in Poland for all orders over 500 PLN

If your payment will be credited to our account by 11:00

Each consumer can return the purchased goods within 14 days
Interlink Electronics linear potentiometer with force sensor (FSLP). It is a passive element with internal resistances that vary independently in response to the position and magnitude of the applied force. This allows a microcontroller with an analog-to-digital converter (ADC) to easily determine where and how hard the bar is being pressed, enabling advanced touch controls (such as menu navigation) or sophisticated touch sensors.
The strip is 38.1 mm long and 13.46 mm wide. It is light (0.5 g) and very thin (0.635 mm). It is intended for use on smooth, flat surfaces (bending may adversely affect its performance). FSLP has a masked adhesive backing for easy installation.
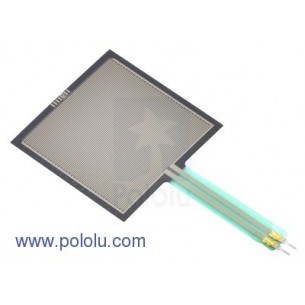
Force-Sensing Resistor - 1.5" Square
Force-Sensing Resistor - 0.5" Circle
Deflection sensor 114 mm long. The sensor resistance changes with the bend angle. At the end, the sensor has a 2-pin connector with a pitch of 2.54 mm. SparkFun SEN-08606
Knob with an inner diameter of 6 mm for mounting on a rotary potentiometer. Beige color
Knob with an inner diameter of 6 mm for mounting on a rotary potentiometer. Green color
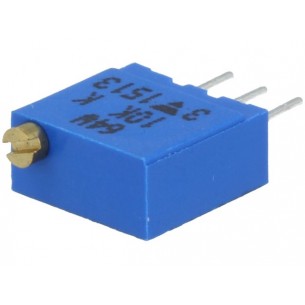
10kΩ 10% multiturn mounting potentiometer THT, Vishay 500mW
A 20x15 mm knob with an internal diameter of 6 mm. For mounting on a potentiometer or rotary encoder
Knob with an inner diameter of 6 mm for mounting on a rotary potentiometer. Brown color
Module with a potentiometer with a rotation range of 270 ° with an analog output. Compatible with 3.3 V and 5 V
Knob with an inner diameter of 6 mm for mounting on a rotary potentiometer. Orange color
No product available!
Knob with an inner diameter of 6 mm for mounting on a rotary potentiometer. Green color
Knob with an inner diameter of 6 mm for mounting on a rotary potentiometer. Red color
A 20x15 mm knob with an internal diameter of 6 mm. For mounting on a potentiometer or rotary encoder
No product available!
Knob with an inner diameter of 6 mm for mounting on a rotary potentiometer. Orange color
A 20x15 mm knob with an internal diameter of 6 mm. For mounting on a potentiometer or rotary encoder
A 20x15 mm knob with an internal diameter of 6 mm. For mounting on a potentiometer or rotary encoder
This V2 Rotation Sensor is arduino compatible multi-ring rotation sensor. It is based on multi-turn precision potentiometer. It can rotate upto 10 laps. DFR0058
Linear slide potentiometer equipped with a DC motor. Used in control panels, they can be used as linear feedback sensors
Linear potentiometer with force sensor. It has an analog output, it allows you to detect where and with what force the sensor strip has been pressed. Pololu 2729