- Obecnie brak na stanie



darmowa wysyłka na terenie Polski dla wszystkich zamówień powyżej 500 PLN

Jeśli Twoja wpłata zostanie zaksięgowana na naszym koncie do godz. 11:00

Każdy konsument może zwrócić zakupiony towar w ciągu 14 dni bez zbędnych pytań
O książce
Postępy elektroniki, inżynierii komputerowej i informatyki wywołały szybki rozwój techniki sterowania, przyspieszany i wymuszany walką konkurencyjną na rynku dóbr przemysłowych i konsumpcyjnych. W dominujących w praktyce sterowania strukturach warstwowych zaczęło się upowszechniać stosowanie bieżącej optymalizacji punktów pracy instalacji, zwiększającej efektywność produkcji przez ciągłe dostosowywanie jej parametrów do warunków otoczenia i wymagań odbiorców.
W strukturze bieżącej optymalizacji nie wystarczają klasyczne pętle regulacyjne z liniowymi regulatorami PID, potrzeba skutecznych algorytmów regulacji wielowymiarowej, nieliniowej i uwzględniającej ograniczenia sygnałów - tzw. algorytmów regulacji zaawansowanej.
Rozpoczynając od omówienia zagadnień sterowania w strukturze warstwowej, w książce przedstawiono algorytmy regulacji zaawansowanej i optymalizacji bieżącej punktów pracy obiektów przemysłowych. W najobszerniej prezentowanym obszarze regulacji zaawansowanej omówiono nieliniowe algorytmy rozmyte typu Takagi-Sugeno i algorytmy regulacji predykcyjnej. Pierwsze z nich stanowią stosunkowo łatwą w projektowaniu i skuteczną technikę regulacji nieliniowej, przy tym mogą być traktowane jako naturalne rozszerzenie znanych algorytmów liniowych. Natomiast regulacja predykcyjna jest zaawansowaną techniką regulacji, która odniosła olbrzymi sukces wywierając w ostatnich latach dominujący wpływ zarówno na kierunki rozwoju przemysłowych układów regulacji, jak i prac badawczych w tym obszarze. W książce omówiono najważniejsze dla praktyki liniowe algorytmy predykcyjne, przede wszystkim DMC i GPC, jak też algorytmy nieliniowe, w tym ważne dla efektywnych zastosowań algorytmy z bieżącą linearyzacją modelu nieliniowego. W zakresie optymalizacji bieżącej, najwięcej miejsca poświęcono algorytmom iteracyjnej poprawy punktu pracy w warunkach niepewności.
Zamierzeniem autora był taki wybór i przedstawienie materiału, aby książka była przydatna nie tylko dla pracowników naukowych i doktorantów, ale również (a może przede wszystkim) służyła inżynierom projektującym czy eksploatującym zaawansowane algorytmy sterowania, jak też studentom wyższych lat studiów technicznych.
Dr hab. inż. Piotr Tatjewski jest profesorem Politechniki Warszawskiej, od 1996 roku dyrektorem Instytutu Automatyki i Informatyki Stosowanej na Wydziale Elektroniki i Technik Informacyjnych. Zajmuje się zagadnieniami struktur i algorytmów sterowania procesami, głównie technicznymi. Prowadzi badania w zakresie algorytmów regulacji zaawansowanej, przede wszystkim algorytmów predykcyjnych, z wykorzystaniem modeli obiektów liniowych i nieliniowych, w tym modeli rozmytych i opisanych sieciami neuronowymi. W obszarze jego zainteresowania są również algorytmy optymalizacji, w tym optymalizacji bieżącej w warunkach niepewności i z wykorzystaniem danych pomiarowych. Opublikował też szereg prac dotyczących optymalizacyjnych metod dekompozycji i koordynacji, przydatnych dla obiektów rozproszonych, dużej skali. Wyniki badań prezentował na wielu renomowanych konferencjach zagranicznych. Przez szereg miesięcy pracował w Technische Universitaet w Hanowerze, w City University w Londynie, przez rok był profesorem wizytującym w University of Birmingham w Anglii.
Brak towaru
Pololu RC Servo Multiplexer 4 Channel (partial kit)
Brak towaru
Moduł do pomiaru zmian położenia w przestrzeni za pomocą wbudowanego czujnika z 9 stopniami swobody, wyposażony w układ LSM9DS0 z 3-osiowym akcelerometrem, 3-osiowym żyroskopem i 3-osiowym magnetometrem. MOD-65
Brak towaru
Układ elektronicznego zapłonu - zestaw do samodzielnego montażu
Brak towaru
Brak towaru
Brak towaru
Brak towaru
Brak towaru
Brak towaru
Brak towaru
Wersja MKII AVR Mini ze złączem USB jest odpowiednikiem bardziej rozbudowanego programatora MKII AVR PRO oraz jest w pełni zgodny z układem AVRISP-MKII. Można nim programować mikrokontrolery z rodziny AVR: ATtiny, ATmega oraz ATxmega. Jest wyposażony w dwa złącza ISP/PDI/TPI 2 x 3 pinowe
Brak towaru
Brak towaru
NanoPi M4V2 to komputer jednoukładowy firmy FriendlyELEC. Zastosowano w nim pamięć RAM typu LPDDR4 oraz dodano m.in.: mikroprzełączniki POWER i RECOVERY i wejście mikrofonowe.
Brak towaru
Minikomputer z czterordzeniowym układem AllWinner H6 ARM Cortex-A53 i 1 GB pamięci LPDDR3. Moduł wyposażony został w procesor graficzny Mali T720 wspierający OpenGL oraz DirectX. Na płytce znaleźć można złącze Ethernet, USB 3.0, audio, interfejs kamery CSI, gniazdo kart SD oraz złącze HDMI. Orange Pi One Plus
Brak towaru
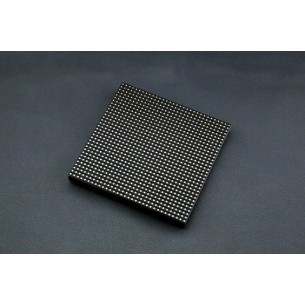
Wyświetlacz matrycowy LED RGB o rozdzielczości 32 x 32 (1024 LED). DFRobot DFR0472
Brak towaru
Brak towaru