









65,16 zł Netto
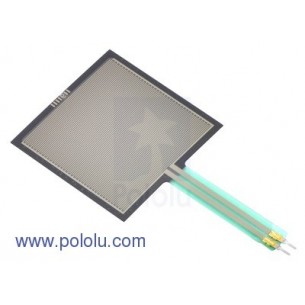
Potencjometr liniowy z czujnikiem siły. Ma wyjście analogowe, pozwala wykryć gdzie i z jaką siłą został naciścięty pasek czujnika. Pololu 2729

darmowa wysyłka na terenie Polski dla wszystkich zamówień powyżej 500 PLN

Jeśli Twoja wpłata zostanie zaksięgowana na naszym koncie do godz. 11:00

Każdy konsument może zwrócić zakupiony towar w ciągu 14 dni bez zbędnych pytań
Potencjometr liniowy z czujnikiem siły (FSLP) firmy Interlink Electronics. Jest elementem pasywnym z wewnętrznymi rezystancjami, które zmieniają się niezależnie w odpowiedzi na położenie i wielkość przyłożonej siły. Dzięki temu mikrokontroler z przetwornikiem analogowo-cyfrowym (ADC) może łatwo określić, gdzie i jak mocno jest naciskany pasek, umożliwiając zaawansowane sterowanie dotykowe (takie jak nawigacja po menu).
Pasek ma długość 38,1 mm i szerokość 13,46 mm. Jest lekki (0,5 g) i bardzo cienki (0,635 mm). Jest przeznaczony do stosowania na gładkich, płaskich powierzchniach (zginanie może niekorzystnie wpłynąć na jego działanie). FSLP ma podkład samoprzylepny dla łatwego montażu.
Rezystancyjny czujnik siły (Force Sensitive Resistor) FSR406 - Pololu 1645
Rezystancyjny czujnik siły (Force Sensing Resistor) FSR402 - Pololu 1696
Czujnik ugięcia o długości 114 mm. Rezystancja czujnika zmienia się wraz z kątem wygięcia. Na końcu czujnik ma złacze 2-pinowe o rastrze 2,54 mm. SparkFun SEN-08606
Moduł z potencjometrem o zakresie obrotu 270° z wyjściem analogowym. Kompatybilny z systemami 3,3 V oraz 5 V
Potencjometr obrotowy liniowy 10kΩ o mocy 0,125 W. Raster wyprowadzeń 5 mm
Moduł z potencjometrem obrotowym. Złącze w tym module zostało przeniesienie na drugą stronę płytki, co umożliwia łatwiejszy montaż i użytkowanie tego modułu. Moduł posiada złącze zgodne z standardem Grove. Seeed studio 101020048
Pokrętło o średnicy wewnętrznej 6 mm do montażu na potencjometrze obrotowym. Kolor beżowy
Pokrętło o średnicy wewnętrznej 6 mm do montażu na potencjometrze obrotowym. Kolor czerwony
Pokrętło o średnicy wewnętrznej 6 mm do montażu na potencjometrze obrotowym. Kolor brązowy
Pokrętło o średnicy wewnętrznej 6 mm do montażu na potencjometrze obrotowym. Kolor zielony
Brak towaru
Moduł z potencjometrem i podświetleniem RGB. Ma ograniczony zakres ruchu i znakomicie sprawdzi się np. do sterowania oświetleniem. Pimoroni PIM523
Liniowy potencjometr suwakowy wyposażony w silnik prądu stałego. Stosowany w panelach sterowania, można je wykorzystać jako czujniki liniowego sprzężenia zwrotnego
Moduł z potencjometrem suwakowym 10 kΩ i kolorowym wskaźnikiem LED przeznaczony do zestawów M5Stack. M5Stack U123
Pokrętło o wymiarach 20x15 mm i średnicy wewnętrznej 6 mm. Do montażu na potencjometrze lub enkoderze obrotowym
Potencjometr montażowy obrotowy 10 kΩ. RM065. Zestaw zawiera 5 sztuk potencjometrów
Pokrętło o średnicy wewnętrznej 6 mm do montażu na potencjometrze obrotowym. Kolor zielony
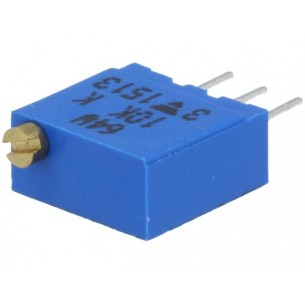
Potencjometr montażowy wieloobrotowy 10kΩ ±10% 500mW THT, Vishay
Pokrętło o średnicy wewnętrznej 6 mm do montażu na potencjometrze obrotowym. Kolor żółty
Potencjometr liniowy z czujnikiem siły. Ma wyjście analogowe, pozwala wykryć gdzie i z jaką siłą został naciścięty pasek czujnika. Pololu 2729