")
")
")
")

23,82 zł Netto
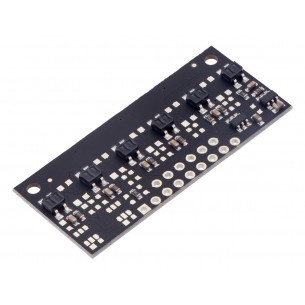
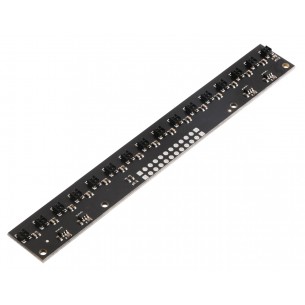
Moduł z 6 transoptorami typu QTR z wyjściem RC (cyfrowym). Moduł zasilany napięciem 2,9 - 5,5V, wykrywa obiekty w odległości do 40 mm. Czujnik znajdzie zastosowanie w projektach wymagających wykrywania zmian w podłożu, np. w robotach typu linefollower. Pololu 4106

darmowa wysyłka na terenie Polski dla wszystkich zamówień powyżej 500 PLN

Jeśli Twoja wpłata zostanie zaksięgowana na naszym koncie do godz. 11:00

Każdy konsument może zwrócić zakupiony towar w ciągu 14 dni bez zbędnych pytań
Czujnik obiciowy składający się z szeregu 6 transoptorów typu QTR z możliwością sterowania indywidualnie jasnością każdego z podczerwonych LED-ów. Sensory na płytce są mocno zagęszczone (HD), a odległość między nimi wynosi 4mm. Moduł może być zasilany napięciem z zakresu od 2,9 V do 5,5 V i niezależnie od napięcia zasilania pobiera prąd do 93 mA. Optymalna odległość czujnika od podłoża to 5 mm, a maksymalna odległość wynosi 40 mm. Moduł idealnie nadaje się do wykrywania zmian w odbiciu światła, dzięki czemu może być stosowany do wykrywania krawędzi podłoża lub do śledzenia linii w robotach typu linefollower.
Cechy
Osoba odpowiedzialna BTC Korporacja sp. z o. o. Lwowska 5 05-120 Legionowo Polska sprzedaz@kamami.pl 22 767 36 20
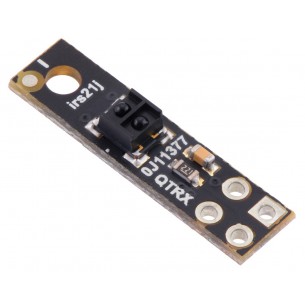
Moduł z 1 transoptorem typu QTR z wyjściem RC (cyfrowym). Moduł zasilany napięciem 2,9 - 5,5V, wykrywa obiekty w odległości do 30 mm. Czujnik znajdzie zastosowanie w projektach wymagających wykrywania zmian w podłożu, np. w robotach typu linefollower. Pololu 4101
Brak towaru
Moduł z 16 transoptorem typu QTRX z wyjściem analogowym. Moduł zasilany napięciem 2,9 - 5,5V, wykrywa obiekty w odległości do 50 mm. Czujnik znajdzie zastosowanie w projektach wymagających wykrywania zmian w podłożu, np. w robotach typu linefollower. Pololu 4456
QTR-3A Reflectance Sensor Array
Moduł z pięcioma czujnikami odbiciowymi. Posiada wyjścia cyfrowe i analogowe. Dzięki wbudowanej pamięci EEPROM możliwa jest kalibracja czujników. Cytron Maker Line
Moduł z 1 transoptorem typu QTRXL z wyjściem RC (cyfrowym). Jest zasilany napięciem od 2,9 do 5,5 V, wykrywa obiekty w odległości do 80 mm. Pololu 4501
Moduł z 6 transoptorami typu QTR z wyjściem RC (cyfrowym). Moduł zasilany napięciem 2,9 - 5,5V, wykrywa obiekty w odległości do 40 mm. Czujnik znajdzie zastosowanie w projektach wymagających wykrywania zmian w podłożu, np. w robotach typu linefollower. Pololu 4146
Moduł z 15 transoptorem typu QTRX z wyjściem analogowym. Moduł zasilany napięciem 2,9 - 5,5V, wykrywa obiekty w odległości do 50 mm. Czujnik znajdzie zastosowanie w projektach wymagających wykrywania zmian w podłożu, np. w robotach typu linefollower. Pololu 4415
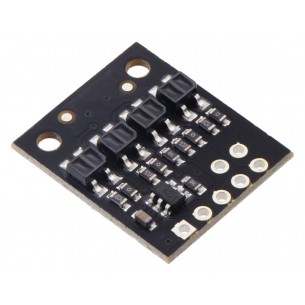
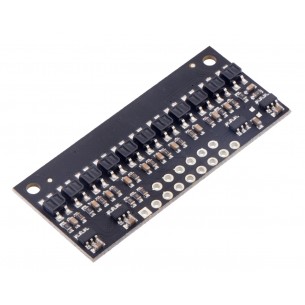
Moduł z 4 transoptorami typu QTR z wyjściem analogowym. Moduł zasilany napięciem 2,9 - 5,5V, wykrywa obiekty w odległości do 40 mm. Czujnik znajdzie zastosowanie w projektach wymagających wykrywania zmian w podłożu, np. w robotach typu linefollower. Pololu 4204
Moduł z 15 transoptorami typu QTR z wyjściem analogowym. Moduł zasilany napięciem 2,9 - 5,5V, wykrywa obiekty w odległości do 50 mm. Czujnik znajdzie zastosowanie w projektach wymagających wykrywania zmian w podłożu, np. w robotach typu linefollower. Pololu 4215
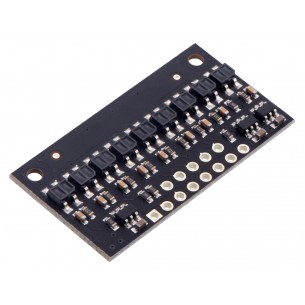
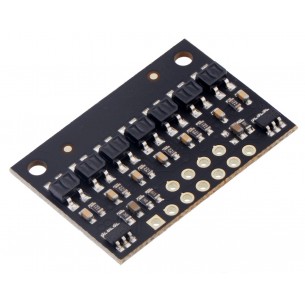
Moduł z 9 transoptorami typu QTR z wyjściem RC (cyfrowym). Moduł zasilany napięciem 2,9 - 5,5V, wykrywa obiekty w odległości do 40 mm. Czujnik znajdzie zastosowanie w projektach wymagających wykrywania zmian w podłożu, np. w robotach typu linefollower. Pololu 4109
Czujnik odbiciowy IR (podczerwień) firmy Waveshare pozwala na śledzenie linii, co jest podstawą działania robotów line follower, może także posłużyć do wykrywania krawędzi. Czujnik ma wyjście analogowe i cyfrowe, czułość czujnika jest regulowana. Waveshare Infrared Reflective Sensor
Moduł z 16 transoptorem typu QTRX z wyjściem RC (cyfrowym). Moduł zasilany napięciem 2,9 - 5,5V, wykrywa obiekty w odległości do 50 mm. Czujnik znajdzie zastosowanie w projektach wymagających wykrywania zmian w podłożu, np. w robotach typu linefollower. Pololu 4356
Moduł czujnika podczerwieni, do wykrywania obiektów w bliskim otoczeniu lub wykrywania linii w robocie typu "Line Follower", zgodny z RoHS
Brak towaru
Moduł z 11 transoptorami typu QTR z wyjściem RC (cyfrowym). Moduł zasilany napięciem 2,9 - 5,5V, wykrywa obiekty w odległości do 40 mm. Czujnik znajdzie zastosowanie w projektach wymagających wykrywania zmian w podłożu, np. w robotach typu linefollower. Pololu 4111
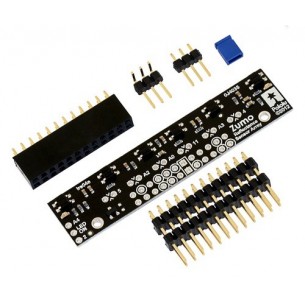
Moduł matrycy sześciu czujników odbiciowych przeznaczony do robota Zumo. Moduł umożliwia dodanie w łatwy sposób wykrywania linii lub wykrywania krawędzi do robota. Pololu 1419
Moduł z 7 transoptorami typu QTR z wyjściem RC (cyfrowym). Moduł zasilany napięciem 2,9 - 5,5V, wykrywa obiekty w odległości do 40 mm. Czujnik znajdzie zastosowanie w projektach wymagających wykrywania zmian w podłożu, np. w robotach typu linefollower. Pololu 4107
Moduł z 6 transoptorami typu QTR z wyjściem RC (cyfrowym). Moduł zasilany napięciem 2,9 - 5,5V, wykrywa obiekty w odległości do 40 mm. Czujnik znajdzie zastosowanie w projektach wymagających wykrywania zmian w podłożu, np. w robotach typu linefollower. Pololu 4106