70,30 zł Netto
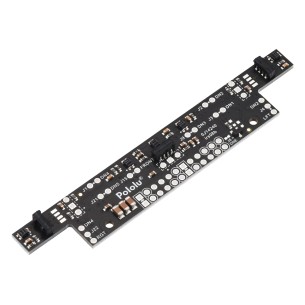
Moduł matrycy sześciu czujników odbiciowych przeznaczony do robota Zumo. Moduł umożliwia dodanie w łatwy sposób wykrywania linii lub wykrywania krawędzi do robota. Pololu 1419
Moduł matrycy czujników odbiciowych przeznaczony do robota Zumo. Moduł umożliwia dodanie w łatwy sposób możliwości wykrywania linii lub wykrywania krawędzi przez robota. Posiada sześć oddzielnych czujników, każdy składa się z emitera podczerwieni sprzężonego z fototranzystorem. Dwa zewnętrzne czujniki są umieszczone na samych krawędziach modułu, aby zmaksymalizować ich użyteczność jako detektory krawędzi, natomiast cztery wewnętrzne czujniki są ułożone bliżej siebie w celu lepszego wykrywania linii.
Moduł matrycy czujników podłączany jest do płytki Zumo Shield, która zapewnia jej zasilanie i niezbędne połączenia I/O.
Procedura odczytu
Czujniki podłączone są do wyjść cyfrowych modułu, a odczyt danych polega na pomiarze czasu rozładowania kondensatora. Procedura odczytu każdego czujnika jest następująca:
Kroki te należy wykonać równolegle dla wszystkich sześciu czujników. Biblioteka Zumo dla Arduino udostępnia funkcje do odczytu czujników i sterowania emiterami (a także funkcje wysokiego poziomu do wykonywania skalibrowanych odczytów i określania pozycji linii), dzięki czemu użytkownik nie musi samodzielnie programować sekwencji kroków.
Cechy
Producent BTC Korporacja sp. z o. o. Lwowska 5 05-120 Legionowo Polska sprzedaz@kamami.pl 22 767 36 20
Osoba odpowiedzialna BTC Korporacja sp. z o. o. Lwowska 5 05-120 Legionowo Polska sprzedaz@kamami.pl 22 767 36 20
Niewielki silnik dużej mocy z metalową przekładnią 75:1, napięciem pracy 6 V, poborem prądu od 0,07 A do 1,6 A, prędkością 410 RPM i maksymalnym momentem obrotowym 1,3 kg*cm. Pololu 2361
Arduino Uno Rev3 to popularna płytka z mikrokontrolerem Atmel ATmega328 z rodziny AVR, do dyspozycji użytkownika jest 14 linii I/O, 6 kanałów PWM, 6 wejść analogowych. Dodatkowy mikrokontroler ATmega16U4 realizuje komunikację przez interfejs USB. Arduino A000066
Robot minisumo na podwoziu gąsienicowym. Posiada dwa silniki, spychacz, płytkę sterującą i zestaw czujników. Robot w wersji złożonej, wymaga dodatkowo Arduino i czterech baterii AA. Pololu 2510
Wszechstronna płyta rozwojowa z mikrokontrolerem ATmega328P, która dzięki swojej kompatybilności z Arduino UNO i różnorodności funkcji, jest doskonałym wyborem do wielu projektów
Moduł matrycy sześciu czujników odbiciowych przeznaczony do robota Zumo. Moduł umożliwia dodanie w łatwy sposób wykrywania linii lub wykrywania krawędzi do robota. Pololu 1419
Robot minisumo na podwoziu gąsienicowym. Posiada dwa silniki, spychacz, płytkę sterującą i zestaw czujników. Robot w wersji złożonej, wymaga dodatkowo Arduino i czterech baterii AA. Pololu 2510
Zestaw do budowy robota minisumo na podwoziu gąsienicowym. Wyposażony w spychacz, płytkę sterującą i zestaw gąsienic. Robot w wersji do samodzielnego montażu, wymaga dodatkowo silników, Arduino i czterech baterii AA. Pololu 2509
Brak towaru
Zestaw zamiennych kół zębatych do robota Zumo w kolorze białym. Zestaw obejmuje dwa koła napędowe i dwa koła pośredniczące. Koła zębate pasują zarówno do robotów Zumo V1.2, jak i Zumo 32U4. Pololu 3129
Brak towaru
Główna płyta sterująca robota Zumo 32U4. Jest dołączona jako część zestawu robotów Zumo 32U4 i wbudowana w zmontowane wersje robotów Zumo 32U4. Dołączone są elementy przewlekane, dyski do enkoderów magnetycznych i elementy montażowe. Pololu 3123
Przedni moduł czujników robota Zumo 32U4. Jest dołączony jako część zestawu robotów Zumo 32U4 i wbudowany w zmontowane wersje robotów Zumo 32U4. W zestawie znajdują się dodatkowe złącza i podczerwone LED-y. Pololu 3122
Brak towaru
Pług przeznaczony do użytku z robotem Zumo 32U4. Pług wykonany został z grubej, wycinanej laserowo stali nierdzewnej i jest dostarczany z plastikowym uchwytem pod płytkę z czujnikami. Pololu 3121
Brak towaru
Zestaw zamiennych kół zębatych do robota Zumo w kolorze czerwonym. Zestaw obejmuje dwa koła napędowe i dwa koła pośredniczące. Koła zębate pasują zarówno do robotów Zumo V1.2, jak i Zumo 32U4. Pololu 3128
Brak towaru
Główna płyta sterująca robota Zumo 32U4 OLED. Jest dołączona jako część zestawu robotów Zumo 32U4 OLED i wbudowana w zmontowane wersje robotów Zumo 32U4 OLED. Dołączone są elementy przewlekane, dyski do enkoderów magnetycznych i elementy montażowe. Pololu 4994
Brak towaru
Zestaw do budowy robota minisumo na podwoziu gąsienicowym. W zestawie jest spychacz, płytka sterująca i zestaw gąsienic. Robot w wersji do samodzielnego montażu, wymaga dodatkowo silników i czterech baterii AA. Pololu 4990
Brak towaru
Robot minisumo na podwoziu gąsienicowym z silnikami Pololu z przekładnią 100:1 HP. Robot w pełni złożony, wymaga dodatkowo czterech baterii AA. Pololu 4993
Brak towaru
Robot minisumo na podwoziu gąsienicowym z silnikami Pololu z przekładnią 75:1 HP. Robot w pełni złożony, wymaga dodatkowo czterech baterii AA. Pololu 4992
Brak towaru
Robot minisumo na podwoziu gąsienicowym z silnikami Pololu z przekładnią 50:1 HP. Robot w pełni złożony, wymaga dodatkowo czterech baterii AA. Pololu 4991
Brak towaru
Przedni moduł czujników robota Zumo 2040. Jest dołączony jako część zestawu robotów Zumo i wbudowany w zmontowane wersje robotów. W zestawie znajdują się dodatkowe złącza i diody IR. Pololu 5015
Brak towaru
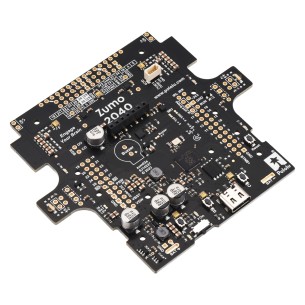
Główna płyta sterująca robota Zumo 2040. Jest dołączona jako część zestawu robotów Zumo 2040 i wbudowana w zmontowane wersje robotów Zumo 2040. Dołączone są elementy przewlekane, dyski do enkoderów magnetycznych i elementy montażowe. Pololu 5014
Brak towaru
Robot minisumo na podwoziu gąsienicowym z silnikami Pololu z przekładnią 100:1 HP. Robot w pełni złożony, wymaga dodatkowo czterech baterii AA. Pololu 5013
Brak towaru
Moduł matrycy sześciu czujników odbiciowych przeznaczony do robota Zumo. Moduł umożliwia dodanie w łatwy sposób wykrywania linii lub wykrywania krawędzi do robota. Pololu 1419