")
")
")
")

507,55 zł Netto
Robot minisumo na podwoziu gąsienicowym. Posiada dwa silniki, spychacz, płytkę sterującą i zestaw czujników. Robot w wersji złożonej, wymaga dodatkowo Arduino i czterech baterii AA. Pololu 2510
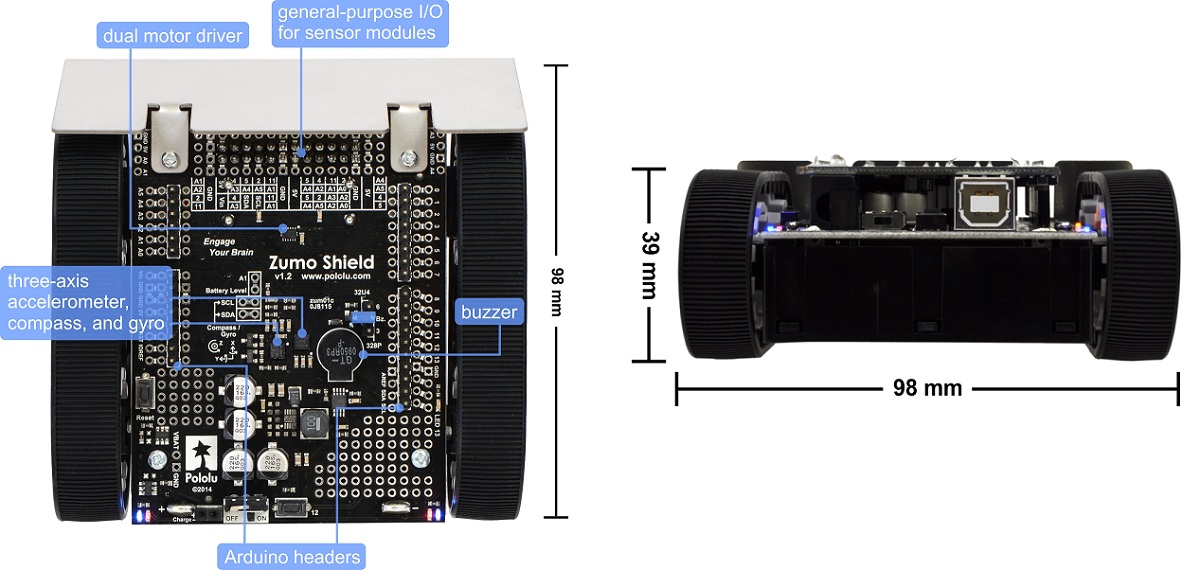
Robot klasy minisumo od Pololu oparty na podwoziu gąsienicowym. Platforma przeznaczona do użytku z Arduino lub kompatybilną płytką, np. A-Star 32U4 Prime. Wymiary (98 x 98 x 39 mm) oraz waga (300 g z bateriami i kontrolerem) pozwalają na użycie robota jako platformy minisumo w popularnych zawodach dla uczniów i studentów organizowanych na całym świecie.
Robot wykorzystuje dwa silniki DC Micro Pololu z przekładnią 75:1 HP do napędzania gąsienic, zapewniając duży moment obrotowy i prędkość maksymalną około 60 cm/s. Robot Zumo zawiera wycinany laserowo spychacz ze stali nierdzewnej montowany z przodu podwozia do popychania przedmiotów oraz matrycę czujników odbiciowych zamontowaną wzdłuż przedniej krawędzi Zumo, która pozwala wykrywać linie lub krawędzie na podłożu. Zestaw wyposażony jest również w moduł płytki głównej stanowiącej płytkę rozszerzeń dla Arduino/A-Star 32U4 Prime. Moduł zawiera dwukanałowy sterownik silników, brzęczyk do odtwarzania prostych dźwięków, przycisk użytkownika oraz 3-osiowy akcelerometr, kompas i żyroskop do wykrywania uderzeń i orientacji.
Uwaga!
Zestaw nie zawiera Arduino ani czterech baterii AA niezbędnych do uruchomienia robota. Należy je zakupić oddzielnie.Robot posiada szerokie wsparcie w postaci bibliotek Arduino dla wszystkich układów dostępnych na płytce. Dostępny jest również w wersji bez silników jako zestaw do samodzielnego montażu.
Producent BTC Korporacja sp. z o. o. Lwowska 5 05-120 Legionowo Polska sprzedaz@kamami.pl 22 767 36 20
Osoba odpowiedzialna BTC Korporacja sp. z o. o. Lwowska 5 05-120 Legionowo Polska sprzedaz@kamami.pl 22 767 36 20
Mikroprocesorowa ładowarka z balanserem (zasilanie 12 V DC), ładuje pakiety LiIon, LiPo, LiFe, Ni-Cd, Ni-MH, PB.
Brak towaru
Niewielki silnik dużej mocy z metalową przekładnią 75:1, napięciem pracy 6 V, poborem prądu od 0,07 A do 1,6 A, prędkością 410 RPM i maksymalnym momentem obrotowym 1,3 kg*cm. Pololu 2361
Płytka uruchomieniowa z mikrokontrolerem ATmega32u4 (AVR), 20 linii I/O, 7 kanałów PWM, kwarc 16 MHz, micro-USB. Dostępne są łatwe w użyciu biblioteki obsługi USB, czujników, wyświetlaczy itp.
Brak towaru
Arduino Uno Rev3 to popularna płytka z mikrokontrolerem Atmel ATmega328 z rodziny AVR, do dyspozycji użytkownika jest 14 linii I/O, 6 kanałów PWM, 6 wejść analogowych. Dodatkowy mikrokontroler ATmega16U4 realizuje komunikację przez interfejs USB. Arduino A000066
Wszechstronny sensor 9DOF z akcelerometrem, magnetometrem i żyroskopem, obsługujący interfejsy I²C i SPI, umożliwiający precyzyjny pomiar ruchu, orientacji i temperatury, z łatwą integracją z Arduino i mikrokontrolerami. Adafruit 3387
Wszechstronna płyta rozwojowa z mikrokontrolerem ATmega328P, która dzięki swojej kompatybilności z Arduino UNO i różnorodności funkcji, jest doskonałym wyborem do wielu projektów
Zestaw do budowy podwozia gąsienicowego do robota minisumo Pololu Zumo. Zestaw nie zawiera silników, baterii ani elementów elektronicznych. Pololu 1418
Spychacz przeznaczony do użytku z podwoziem Zumo i dołączone jako część zmontowanego robota Zumo. Spychacz wykonany został z grubej, wycinanej laserowo stali nierdzewnej o grubości 0,91 mm i jest dostarczany bez wygiętych blaszek mocujących. Pololu 1410
Brak towaru
Zestaw z kontrolerem ze złączami kompatybilnymi z Arduino do budowy robota Zumo. Moduł zawiera podwójny sterownik silników, buzzer oraz przycisk użytkownika, a także 3-osiowy akcelerometr i kompas. Pololu 2504
Moduł matrycy sześciu czujników odbiciowych przeznaczony do robota Zumo. Moduł umożliwia dodanie w łatwy sposób wykrywania linii lub wykrywania krawędzi do robota. Pololu 1419
Robot minisumo na podwoziu gąsienicowym. Posiada dwa silniki, spychacz, płytkę sterującą i zestaw czujników. Robot w wersji złożonej, wymaga dodatkowo Arduino i czterech baterii AA. Pololu 2510
Zestaw do budowy robota minisumo na podwoziu gąsienicowym. Wyposażony w spychacz, płytkę sterującą i zestaw gąsienic. Robot w wersji do samodzielnego montażu, wymaga dodatkowo silników, Arduino i czterech baterii AA. Pololu 2509
Brak towaru
Zestaw zamiennych kół zębatych do robota Zumo w kolorze białym. Zestaw obejmuje dwa koła napędowe i dwa koła pośredniczące. Koła zębate pasują zarówno do robotów Zumo V1.2, jak i Zumo 32U4. Pololu 3129
Brak towaru
Główna płyta sterująca robota Zumo 32U4. Jest dołączona jako część zestawu robotów Zumo 32U4 i wbudowana w zmontowane wersje robotów Zumo 32U4. Dołączone są elementy przewlekane, dyski do enkoderów magnetycznych i elementy montażowe. Pololu 3123
Przedni moduł czujników robota Zumo 32U4. Jest dołączony jako część zestawu robotów Zumo 32U4 i wbudowany w zmontowane wersje robotów Zumo 32U4. W zestawie znajdują się dodatkowe złącza i podczerwone LED-y. Pololu 3122
Brak towaru
Pług przeznaczony do użytku z robotem Zumo 32U4. Pług wykonany został z grubej, wycinanej laserowo stali nierdzewnej i jest dostarczany z plastikowym uchwytem pod płytkę z czujnikami. Pololu 3121
Brak towaru
Zestaw zamiennych kół zębatych do robota Zumo w kolorze czerwonym. Zestaw obejmuje dwa koła napędowe i dwa koła pośredniczące. Koła zębate pasują zarówno do robotów Zumo V1.2, jak i Zumo 32U4. Pololu 3128
Brak towaru
Główna płyta sterująca robota Zumo 32U4 OLED. Jest dołączona jako część zestawu robotów Zumo 32U4 OLED i wbudowana w zmontowane wersje robotów Zumo 32U4 OLED. Dołączone są elementy przewlekane, dyski do enkoderów magnetycznych i elementy montażowe. Pololu 4994
Brak towaru
Zestaw do budowy robota minisumo na podwoziu gąsienicowym. W zestawie jest spychacz, płytka sterująca i zestaw gąsienic. Robot w wersji do samodzielnego montażu, wymaga dodatkowo silników i czterech baterii AA. Pololu 4990
Brak towaru
Robot minisumo na podwoziu gąsienicowym z silnikami Pololu z przekładnią 100:1 HP. Robot w pełni złożony, wymaga dodatkowo czterech baterii AA. Pololu 4993
Brak towaru
Robot minisumo na podwoziu gąsienicowym z silnikami Pololu z przekładnią 75:1 HP. Robot w pełni złożony, wymaga dodatkowo czterech baterii AA. Pololu 4992
Brak towaru
Robot minisumo na podwoziu gąsienicowym z silnikami Pololu z przekładnią 50:1 HP. Robot w pełni złożony, wymaga dodatkowo czterech baterii AA. Pololu 4991
Brak towaru
Robot minisumo na podwoziu gąsienicowym. Posiada dwa silniki, spychacz, płytkę sterującą i zestaw czujników. Robot w wersji złożonej, wymaga dodatkowo Arduino i czterech baterii AA. Pololu 2510