
















Kategoria: Czujniki 6DOF/9DOF/10DOF
Nowoczesne Czujniki 6DOF/9DOF/10DOF – Precyzyjna Kontrola i Pomiar
Witamy w kategorii czujników 6DOF/9DOF/10DOF, gdzie znajdziesz najbardziej zaawansowane rozwiązania w dziedzinie sensorów ruchu i pozycji. Nasze moduły, wyposażone w akcelerometr, żyroskop, barometr i inne kluczowe komponenty, zapewniają dokładne pomiary w różnych aplikacjach – od robotyki, przez drony, po systemy nawigacyjne. Czujniki te są idealne do śledzenia ruchu i stabilizacji, co czyni je niezastąpionymi w projektach wymagających wysokiej precyzji i niezawodności. Dzięki precyzyjnym urządzeniom IMU (Inertial Measurement Unit) oraz zaawansowanym technikom kalibracji czujników, gwarantujemy niezawodność i wysoką jakość danych. Przekonaj się, jak nasze moduły 6DOF, 9DOF i 10DOF mogą odmienić Twoje projekty, oferując niezrównane możliwości pomiarowe i kontrolne.
Liczba produktów: 57
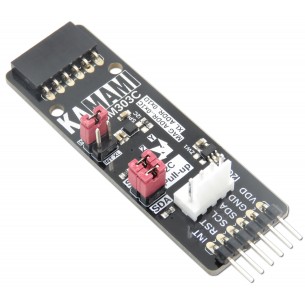
KAmodLSM303C to moduł z trójosiowym akcelerometrem i magnetometrem LSM303C firmy STMicroelectronics. Układ posiada cyfrowe wyjście sygnału (magistrala I2C lub SPI) i umożliwia pomiar przyspieszeń oraz wartości pola magnetycznego w trzech osiach.
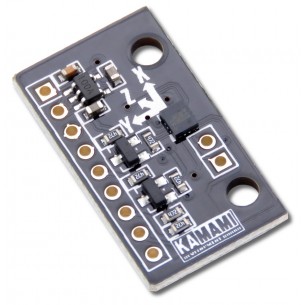
KAmodLSM6DS3 to moduł pozwalający na pomiar przyspieszenia oraz wartości prędkości kątowej. Ma wbudowany stabilizator napięcia oraz translatory poziomów na liniach SDA/SCL, dzięki czemu może być wykorzystany w systemach zasilanych napięciem 2,5-5,5V

Moduł z 9-osiowym czujnikiem IMU ICM-20948. Układ to zintegrowany 3-osiowy akcelerometr, żyroskop i magnetometr oraz cyfrowy procesor ruchu DMP (Digital Motion Processor). Komunikacja przez I2C lub SPI. Adafruit 4554
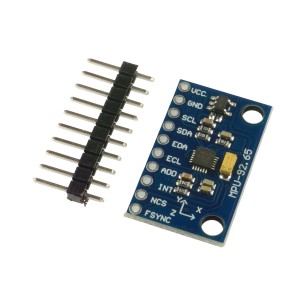
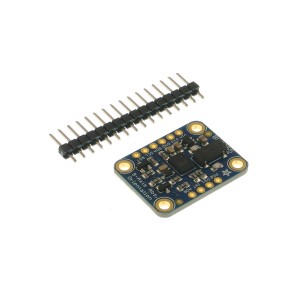
Moduł akcelerometru oraz żyroskopu, pozwala na pomiar przyspieszenia w zakresie do +/- 16 G oraz prędkości kątowej w zakresie do +/- 2000 dps. modMPU6500 (GY-6500)
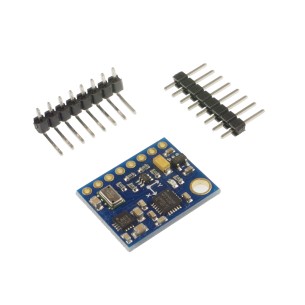
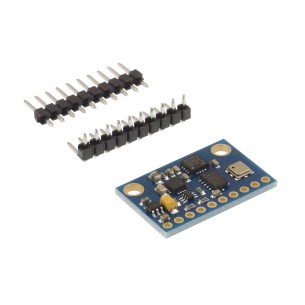
Moduł GY-86 to z moduł z czujnikami MPU6050, HMC5883L oraz MS5611, pozwalający na pomiar ruchu w dziewięciu osiach oraz pomiar ciśnienia atmosferycznego. Moduł ma wbudowany stabilizator napięcia 3,3V. modGY-86

Niewielki moduł IMU 9 DoF z 3-osiowym żyroskopem i akcelerometrem (LSM6DSO) i 3-osiowym magnetometrem (LIS3MDL). Wyposażony jest w interfejs I2C, stabilizator napięcia oraz konwerter poziomów napięć. Pololu 2862
Moduł wyposażony w 3-osiowy akcelerometr i 3-osiowy żyroskop umożliwiający precyzyjny pomiar ruchu oraz orientacji przestrzennej. Układ MPU6050 z wbudowanym silnikiem DMP pozwala na dokładne monitorowanie przyspieszenia do ±16 g oraz prędkości kątowej do ±2000°/s. Moduł komunikuje się przez interfejs UART lub I2C i może współpracować z dodatkowymi sensorami, co ułatwia integrację z projektami robotycznymi, dronami czy systemami sterowania ruchem. Elecrow CRT02122G
BNO055 to jedno z najprostszych i najbardziej niezawodnych rozwiązań do pomiaru orientacji 3D. Eliminuje konieczność pisania i strojenia algorytmów fuzji sensorów, oferując stabilne i gotowe dane w czasie rzeczywistym. Idealnie sprawdzi się w robotyce, dronach, systemach stabilizacji, VR/AR, nawigacji oraz projektach edukacyjnych i prototypowych. Adafruit 2472
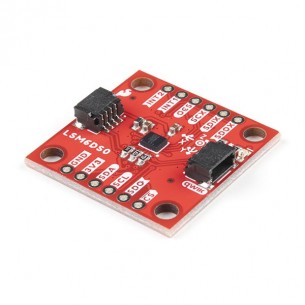
Moduł z 6-osiowym czujnikiem IMU LSM6DSO, który łączy 3-osiowy akcelerometr i żyroskop oraz bufor FIFO o pojemności 9 kB i funkcje obsługi zdarzeń. Komunikuje się przez I2C lub SPI. SparkFun SEN-18020

Moduł z 6-osiowym czujnikiem ruchu BMI160 (akcelerometr i żyroskop) z 16-bitową rozdzielczością danych. Zasilany napięciem z zakresu od 3,2 do 6 V. Komunikacja I2C. DFRobot SEN0250

Pololu MiniIMU-9 v5 to niewielki moduł z 3-osiowym żyroskopem i akcelerometrem (LSM6DS33), 3-osiowym magnetometrem (LIS3MDL), interfejsem I2C, stabilizatorem napięcia oraz konwerterem poziomów logicznych. Pololu 2738
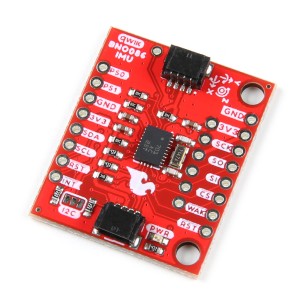
Moduł z czujnikiem do zastosowania w obszarze wirtualnej rzeczywistości (VR). Został oparty o układ BNO086, który integruje akcelerometr, żyroskop oraz magnetometr oraz mikrokontroler z rdzeniem ARM Cortex M0+. SparkFun SEN-22857

Moduł z 6-osiowym czujnikiem IMU MPU6886, który łączy 3-osiowy akcelerometr i 3-osiowy żyroskop. M5Stack U095

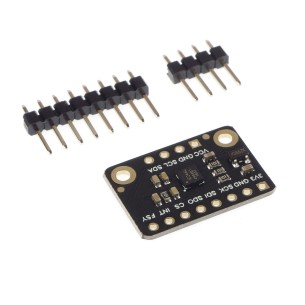
Moduł z czujnikiem przyspieszenia i prędkości obrotowej oparty na układzie LSM6DS3TR-C oraz magnetometrze LIS3MDL. Wyposażony w złącze STEMMA QT, komunikuje się przez interfejs I2C lub SPI. Adafruit 5543
Moduł z czujnikiem przyspieszenia i prędkości obrotowej oparty na układzie ICG-20660L. Komunikuje się przez interfejs I2C lub SPI. DFRobot SEN0443

Moduł z 6-osiowym czujnikiem IMU, który pozwala na pomiar przyspieszenia i prędkości obrotowej w zakresie do ±16g i ±2000dps. Wyposażony w złącze STEMMA QT, komunikuje się przez I2C lub SPI. Adafruit 4503
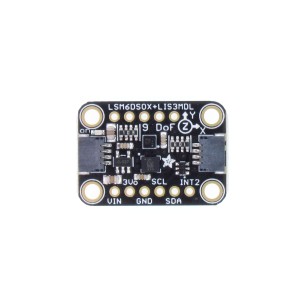
Moduł z czujnikiem przyspieszenia i prędkości obrotowej oparty na układzie LSM6DSOX oraz magnetometrze LIS3MDL. Wyposażony w złącze STEMMA QT, komunikuje się przez interfejs I2C, SPI lub I3C. Adafruit 4517
GY-801 to moduł 9DOF IMU z układami L3G4200D, ADXL345, MMC5883MA oraz BMP180. Pozwala na pomiar ruchu obiektu oraz cisnienia atmosferycznego.
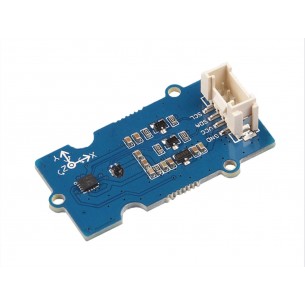
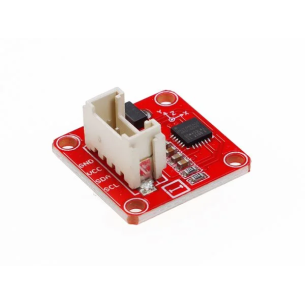
Moduł z 9-osiowym czujnikiem IMU, który łączy w sobie akcelerometr i żyroskop (układ ICM20600) oraz magnetometr (układ AK09918). Płytka została wyposażona w złącze Grove i komunikuje się przez interfejs I2C. Seeed Studio 101020585
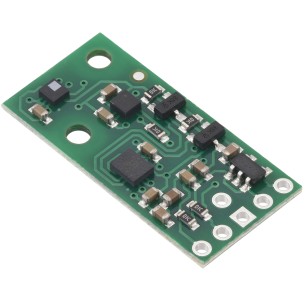
Niewielki moduł IMU 10 DoF z 3-osiowym żyroskopem i akcelerometrem (LSM6DSO), 3-osiowym magnetometrem (LIS3MDL) oraz barometrem (LPS22DF). Wyposażony jest w interfejs I2C, stabilizator napięcia oraz konwerter poziomów napięć. Pololu 2863
Wszechstronność Zastosowań
Nasze czujniki znajdują zastosowanie w wielu dziedzinach, od technologii konsumenckiej po zaawansowane systemy przemysłowe. Moduły 6DOF doskonale nadają się do stabilizacji i śledzenia ruchu w aplikacjach VR oraz dronach. Moduły 9DOF, dzięki dodatkowi magnetometru, idealnie sprawdzają się w systemach nawigacyjnych i robotyce, gdzie orientacja przestrzenna jest kluczowa. Moduły 10DOF, wyposażone dodatkowo w barometr, są niezastąpione w aplikacjach wymagających precyzyjnego pomiaru wysokości, takich jak lotnictwo i meteorologia.
Precyzyjna Kalibracja Czujników
Aby zapewnić najwyższą dokładność pomiarów, nasze czujniki przechodzą zaawansowane procesy kalibracji. Kalibracja czujników obejmuje dostosowanie ich do warunków pracy oraz eliminację potencjalnych błędów pomiarowych, co jest kluczowe dla zastosowań wymagających wysokiej precyzji.
Technologie i Komponenty
Moduły 6DOF łączą w sobie akcelerometr i żyroskop, umożliwiając pomiar ruchu w sześciu stopniach swobody. Moduły 9DOF dodają do tego magnetometr, co pozwala na pełną orientację w przestrzeni. Moduły 10DOF dodatkowo integrują barometr, umożliwiając pomiar ciśnienia atmosferycznego i wysokości. Wszystkie nasze moduły korzystają z zaawansowanych technologii sensor fusion, co pozwala na uzyskanie precyzyjnych i niezawodnych danych.
Dlaczego Warto Wybrać Nasze Czujniki?
Nasze czujniki 6DOF, 9DOF i 10DOF to gwarancja najwyższej jakości i precyzji. Dzięki zaawansowanym technologiom, takim jak IMU, oraz dokładnej kalibracji, nasze produkty spełniają najwyższe standardy jakości. Niezależnie od tego, czy tworzysz system nawigacyjny, robotyczny czy aplikację VR, nasze czujniki zapewnią Ci dokładność i niezawodność, na której możesz polegać. Zapraszamy do zapoznania się z naszą ofertą i odkrycia, jak nasze czujniki mogą wzbogacić Twoje projekty.