101,12 zł Netto
Niewielki moduł IMU 10 DoF z 3-osiowym żyroskopem i akcelerometrem (LSM6DSO), 3-osiowym magnetometrem (LIS3MDL) oraz barometrem (LPS22DF). Wyposażony jest w interfejs I2C, stabilizator napięcia oraz konwerter poziomów napięć. Pololu 2863
Pololu AltIMU-10 v6 to moduł z 3-osiowym żyroskopem i akcelerometrem LSM6DSO, 3-osiowym magnetometrem LIS3MDL oraz barometrem LPS22DF. Ma bardzo małe wymiary dzięki czemu może być stosowany w różnego rodzaju projektach, jak roboty mobilne czy urządzenia IoT. Ma wbudowany obwód zasilania oparty o stabilizator 3,3 V oraz konwerter poziomów logicznych, dzięki czemu może współpracować z systemami 3,3 V oraz 5 V. Czujniki mają wiele konfigurowalnych opcji, w tym dynamicznie wybierane czułości żyroskopu, akcelerometru i magnetometru. Dostęp do dwóch układów scalonych można uzyskać za pośrednictwem wspólnego interfejsu I2C/TWI. Dodatkowo pin konfiguracji umożliwia użytkownikom zmianę adresów I2C czujników i podłączenie dwóch MiniIMU do tej samej magistrali.
Czujnik dostarcza wszystkie dane potrzebne do stworzenia systemu AHRS. Z odpowiednim algorytmem mikrokontroler lub komputer może użyć danych do obliczenia orientacji płytki. Żyroskop można użyć do bardzo dokładnego śledzenia obrotu w krótkiej skali czasowej, podczas gdy akcelerometr i kompas mogą zmniejszyć dryf, zapewniając dane odniesienia.
Cechy
Producent BTC Korporacja sp. z o. o. Lwowska 5 05-120 Legionowo Polska sprzedaz@kamami.pl 22 767 36 20
Osoba odpowiedzialna BTC Korporacja sp. z o. o. Lwowska 5 05-120 Legionowo Polska sprzedaz@kamami.pl 22 767 36 20
Zestaw 40 szt. przewodów połączeniowych żeńsko-żeńskich, w różnych kolorach o długości 10 cm
Zestaw 40 szt. przewodów połączeniowych męsko-żeńskich, w różnych kolorach o długości 10 cm
Zestaw 40 szt. przewodów połączeniowych męsko-męskich, w różnych kolorach o długości 10 cm
Niewielki moduł IMU 9 DoF z 3-osiowym żyroskopem i akcelerometrem (LSM6DSO) i 3-osiowym magnetometrem (LIS3MDL). Wyposażony jest w interfejs I2C, stabilizator napięcia oraz konwerter poziomów napięć. Pololu 2862
KAmodLSM303C to moduł z trójosiowym akcelerometrem i magnetometrem LSM303C firmy STMicroelectronics. Układ posiada cyfrowe wyjście sygnału (magistrala I2C lub SPI) i umożliwia pomiar przyspieszeń oraz wartości pola magnetycznego w trzech osiach.
KAmodLSM6DS3 to moduł pozwalający na pomiar przyspieszenia oraz wartości prędkości kątowej. Ma wbudowany stabilizator napięcia oraz translatory poziomów na liniach SDA/SCL, dzięki czemu może być wykorzystany w systemach zasilanych napięciem 2,5-5,5V
Wszechstronny sensor 9DOF z akcelerometrem, magnetometrem i żyroskopem, obsługujący interfejsy I²C i SPI, umożliwiający precyzyjny pomiar ruchu, orientacji i temperatury, z łatwą integracją z Arduino i mikrokontrolerami. Adafruit 3387
Pmod NAV to moduł wyposażony w układ IMU 9DOF LSM9DS1 (akcelerometr, żyroskop, magnetometr) oraz w barometr (LPS25HB). Do komunikacji z modułem służy interfejs SPI. Digilent 410-326
Brak towaru
Moduł GY-87 to z moduł z czujnikami MPU6050, QMC5883L oraz BMP180, pozwalający na pomiar ruchu w dziewięciu osiach oraz pomiar ciśnienia atmosferycznego. Moduł ma wbudowany stabilizator napięcia 3,3 V
Brak towaru
Moduł GY-86 to z moduł z czujnikami MPU6050, HMC5883L oraz MS5611, pozwalający na pomiar ruchu w dziewięciu osiach oraz pomiar ciśnienia atmosferycznego. Moduł ma wbudowany stabilizator napięcia 3,3V. modGY-86
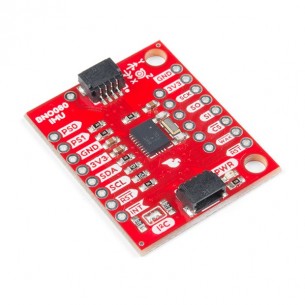
Moduł czujnika do zastosowania w obszarze wirtualnej rzeczywistości (VR). Został oparty o układ BNO080, który integruje akcelerometr, żyroskop oraz magnetometr z mikrokontrolerem z rdzeniem ARM Cortex M0+. SparkFun SEN-14686
Brak towaru
Moduł z czujnikiem przyspieszenia i prędkości obrotowej oparty na układzie MPU-6050. Komunikuje się przez interfejs I2C. DFRobot SEN0142
Brak towaru
Moduł z 9-osiowym czujnikiem IMU ICM-20948. Układ to zintegrowany 3-osiowy akcelerometr, żyroskop i magnetometr oraz cyfrowy procesor ruchu DMP (Digital Motion Processor). Komunikacja przez I2C lub SPI. SparkFun SEN-15335
Moduł z 6-osiowym czujnikiem ruchu BMI160 (akcelerometr i żyroskop) z 16-bitową rozdzielczością danych. Zasilany napięciem z zakresu od 3,2 do 6 V. Komunikacja I2C. DFRobot SEN0250
Moduł z 6-osiowym czujnikiem IMU MPU6886, który łączy 3-osiowy akcelerometr i 3-osiowy żyroskop. M5Stack U095
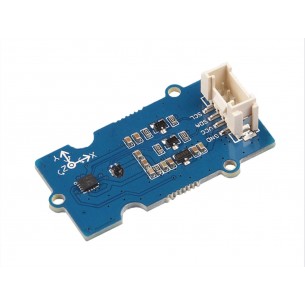
Moduł z układem ADIS16470, który łączy w sobie 3-osiowy akcelerometr i żyroskop. Płytka została wyposażona w złącze Grove i komunikuje się przez interfejs I2C lub SPI. Seeed Studio 101020672
Brak towaru
Moduł z 6-osiowym czujnikiem BMI088, który łączy w sobie akcelerometr i żyroskop. Płytka została wyposażona w złącze Grove i komunikuje się przez I2C. Seeed Studio 101020584
Brak towaru
Moduł z 9-osiowym czujnikiem IMU, który łączy w sobie akcelerometr i żyroskop (układ ICM20600) oraz magnetometr (układ AK09918). Płytka została wyposażona w złącze Grove i komunikuje się przez interfejs I2C. Seeed Studio 101020585
Moduł z czujnikiem LSM6DS3, który łączy w sobie 3-osiowy akcelerometr i 3-osiowy żyroskop. Płytka została wyposażona w złącze Grove i komunikuje się przez interfejs I2C. Seeed Studio 105020012
Kompaktowy sensor IMU 9DOF z akcelerometrem, żyroskopem i magnetometrem, obsługujący zaawansowaną fuzję danych dzięki rdzeniowi Arm Cortex M0 i oprogramowaniu CEVA SH-2, oferujący interfejsy I²C, SPI i UART-RVC oraz szeroki zakres funkcji do precyzyjnej analizy ruchu i orientacji. Adafruit 4754
Niewielki moduł IMU 10 DoF z 3-osiowym żyroskopem i akcelerometrem (LSM6DSO), 3-osiowym magnetometrem (LIS3MDL) oraz barometrem (LPS22DF). Wyposażony jest w interfejs I2C, stabilizator napięcia oraz konwerter poziomów napięć. Pololu 2863