



49,23 zł Netto
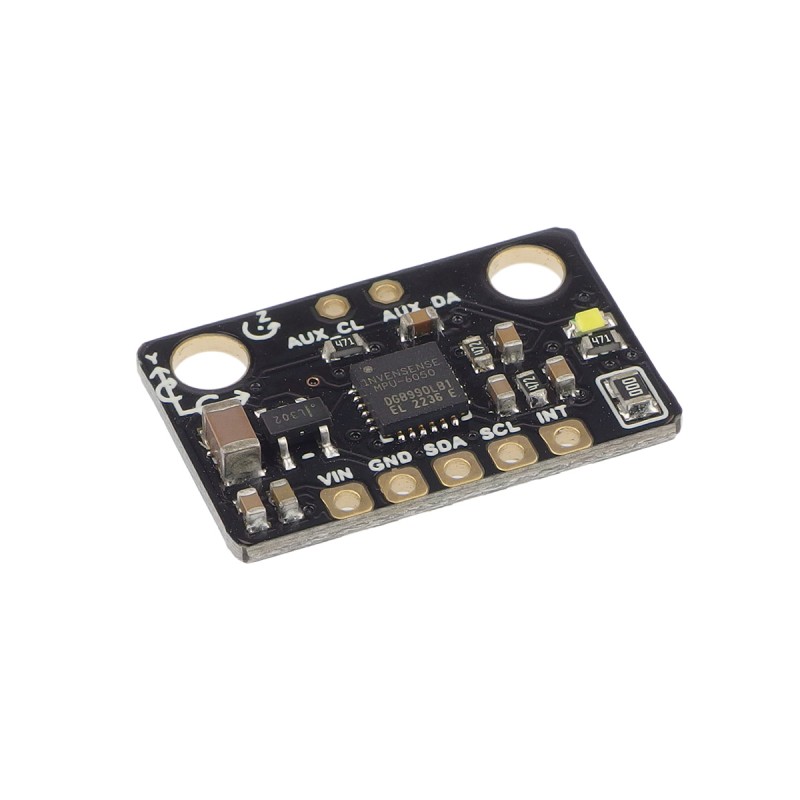
Moduł z czujnikiem przyspieszenia i prędkości obrotowej oparty na układzie MPU-6050. Komunikuje się przez interfejs I2C. DFRobot SEN0142
Moduł 6 DoF z 3-osiowym akcelerometrem i 3-osiowym żyroskopem oparty na układzie MPU-6050. Umożliwia pomiar przyspieszenia względem Ziemii z programowalnym zakresem ±2g, ±4g, ±8g lub ±16g oraz prędkości obrotowej z zakresem ±250, ±500, ±1000 lub ±2000°/s, co pozwala na określenie orientacji w przestrzeni. Sprawdzi się m.in. w projektach robotów mobilnych czy obiektów latających (UAV). Moduł jest kompatybilny z kontrolerami 3,3 V oraz 5 V, a komunikacja odbywa się przez interfejs I2C. Pełna dokumentacja wraz z przykładami użycia dostępne są na stronie Wiki produktu.
Cechy
Producent BTC Korporacja sp. z o. o. Lwowska 5 05-120 Legionowo Polska sprzedaz@kamami.pl 22 767 36 20
Osoba odpowiedzialna BTC Korporacja sp. z o. o. Lwowska 5 05-120 Legionowo Polska sprzedaz@kamami.pl 22 767 36 20
Moduł 10 DoF z akcelerometrem ADXL345, magnetometrem HMC5883L, żyroskopem ITG-3205 i barometrem BMP280. Komunikacja przez interfejs I2C. DFRobot SEN0140
Brak towaru
Zestaw 40 szt. przewodów połączeniowych żeńsko-żeńskich, w różnych kolorach o długości 10 cm
Zestaw 40 szt. przewodów połączeniowych męsko-żeńskich, w różnych kolorach o długości 10 cm
Zestaw 40 szt. przewodów połączeniowych męsko-męskich, w różnych kolorach o długości 10 cm
Moduł z czujnikiem LSM6DS3, który łączy w sobie 3-osiowy akcelerometr i 3-osiowy żyroskop. Płytka została wyposażona w złącze Grove i komunikuje się przez interfejs I2C. Seeed Studio 105020012
Kompaktowy sensor IMU 9DOF z akcelerometrem, żyroskopem i magnetometrem, obsługujący zaawansowaną fuzję danych dzięki rdzeniowi Arm Cortex M0 i oprogramowaniu CEVA SH-2, oferujący interfejsy I²C, SPI i UART-RVC oraz szeroki zakres funkcji do precyzyjnej analizy ruchu i orientacji. Adafruit 4754
Moduł 10 DoF z akcelerometrem ADXL345, magnetometrem HMC5883L, żyroskopem ITG-3205 i barometrem BMP280. Komunikacja przez interfejs I2C. DFRobot SEN0140
Brak towaru
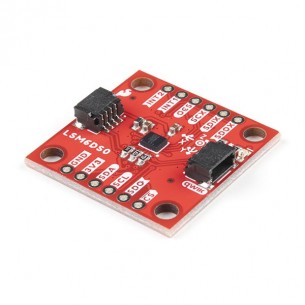
Moduł z 6-osiowym czujnikiem IMU LSM6DSO, który łączy 3-osiowy akcelerometr i żyroskop oraz bufor FIFO o pojemności 9 kB i funkcje obsługi zdarzeń. Komunikuje się przez I2C lub SPI. SparkFun SEN-18020
Moduł z 9-osiowym czujnikiem IMU ICM-20948, zintegrowanym 3-osiowym akcelerometrem, żyroskopem i magnetometrem oraz cyfrowym procesorem ruchu DMP (Digital Motion Processor). Komunikacja przez I2C. Pimoroni PIM448
Brak towaru
Moduł z 9-osiowym czujnikiem IMU BNO055. Ma wbudowany układ przetwarzający, który zwraca dane jako orientację w przestrzeni 3D. Komunikuje się przez I2C. Adafruit 4646
Brak towaru
Moduł z 3-osiowym akcelerometrem i żyroskopem ISM330DHCX. Wyposażony w złącze STEMMA QT, komunikuje się przez interfejs I2C lub SPI. Adafruit 4502
Moduł z 9-osiowym czujnikiem IMU ICM-20948. Układ to zintegrowany 3-osiowy akcelerometr, żyroskop i magnetometr oraz cyfrowy procesor ruchu DMP (Digital Motion Processor). Komunikacja przez I2C lub SPI. Adafruit 4554
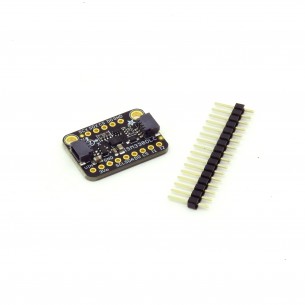
Moduł z czujnikiem przyspieszenia i prędkości obrotowej oparty na układzie LSM6DSOX. Wyposażony w złącze STEMMA QT, komunikuje się przez interfejs I2C, SPI lub I3C. Adafruit 4438
Moduł z czujnikiem przyspieszenia i prędkości obrotowej oparty na układzie MPU-6050. Wyposażony w złącze STEMMA QT, komunikuje się przez interfejs I2C. Adafruit 3886
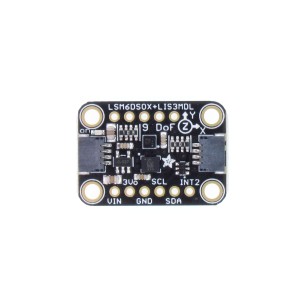
Moduł z czujnikiem przyspieszenia i prędkości obrotowej oparty na układzie LSM6DSOX oraz magnetometrze LIS3MDL. Wyposażony w złącze STEMMA QT, komunikuje się przez interfejs I2C, SPI lub I3C. Adafruit 4517
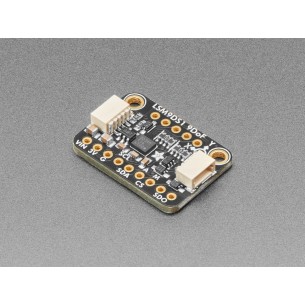
Moduł z czujnikiem przyspieszenia i prędkości obrotowej oparty na układzie LSM6DSO32. Wyposażony w złącze STEMMA QT, komunikuje się przez interfejs I2C, SPI lub I3C. Adafruit 4692
Moduł z 6-osiowym czujnikiem IMU, który pozwala na pomiar przyspieszenia i prędkości obrotowej w szerokim zakresie ±30g i ±4000dps. Komunikuje się przez I2C. Adafruit 4464
Brak towaru
Kompaktowy czujnik 9-DOF, łączący 3-osiowy akcelerometr, magnetometr i żyroskop, umożliwiający precyzyjne określenie orientacji obiektu. Dzięki wsparciu dla magistrali I2C/SPI, kompatybilności z systemem STEMMA QT oraz zasilaniu 3V/5V, znajduje zastosowanie w projektach robotyki, nawigacji 3D, VR, AR oraz systemach stabilizacji. Adafruit 4634
Brak towaru
Moduł z 9-osiowym IMU dedykowany do płytek Feather. Łączy układ ISM330DHCX (akcelerometr i żyroskop) i LIS3MDL (magnetometr). Komunikacja przez interfejs I2C. Adafruit 4569
Moduł z czujnikiem przyspieszenia i prędkości obrotowej oparty na układzie MPU6050. Komunikuje się przez interfejs I2C lub UART
Brak towaru
Moduł z czujnikiem przyspieszenia i prędkości obrotowej oparty na układzie MPU-6050. Komunikuje się przez interfejs I2C. DFRobot SEN0142