


59,59 zł Netto
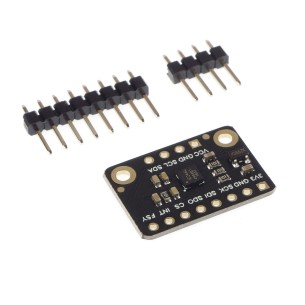
Moduł z czujnikiem przyspieszenia i prędkości obrotowej oparty na układzie LSM6DSO32. Wyposażony w złącze STEMMA QT, komunikuje się przez interfejs I2C, SPI lub I3C. Adafruit 4692
Moduł 6 DoF z 3-osiowym akcelerometrem i 3-osiowym żyroskopem oparty na układzie LSM6DSO32. Pozwala na pomiar przyspieszenia względem Ziemii oraz prędkości obrotowej, co umożliwia określenie orientacji w przestrzeni. Ma wbudowane wykrywanie uderzeń, aktywności, krokomierz oraz programowalną maszynę stanów i moduł uczenia maszynowego, który może wykonywać podstawowe rozpoznawanie gestów. Sprawdzi się m.in. w projektach robotów mobilnych czy obiektów latających (UAV). Moduł jest kompatybilny z kontrolerami 3,3 V oraz 5 V, a komunikacja odbywa się przez interfejs I2C (złącze STEMMA QT) lub SPI. Układ wspiera także interfejs MIPI I3C. Pełna dokumentacja dostępna jest na stronie produktu.
Cechy
Producent BTC Korporacja sp. z o. o. Lwowska 5 05-120 Legionowo Polska sprzedaz@kamami.pl 22 767 36 20
Osoba odpowiedzialna BTC Korporacja sp. z o. o. Lwowska 5 05-120 Legionowo Polska sprzedaz@kamami.pl 22 767 36 20
4-żyłowy przewód o długości 50 mm. Zakończony z obu stron wtyczką STEMMA QT (Qwiic). Adafruit 4399
Brak towaru
4-żyłowy przewód o długości 100 mm. Zakończony z obu stron wtyczką STEMMA QT (Qwiic). Adafruit 4210
4-żyłowy przewód o długości 200 mm. Zakończony z obu stron wtyczką STEMMA QT (Qwiic). Adafruit 4401
4-żyłowy przewód o długości 300 mm. Zakończony z obu stron wtyczką STEMMA QT (Qwiic). Adafruit 5384
Brak towaru
4-żyłowy przewód o długości 400 mm. Zakończony z obu stron wtyczką STEMMA QT (Qwiic). Adafruit 5385
Moduł z czujnikiem przyspieszenia i prędkości obrotowej oparty na układzie MPU6050. Komunikuje się przez interfejs I2C lub UART
Brak towaru
Moduł z czujnikiem przyspieszenia i prędkości obrotowej oparty na układzie ICG-20660L. Komunikuje się przez interfejs I2C lub SPI. DFRobot SEN0443
Moduł z 9-osiowym czujnikiem IMU ICM-20948 (3-osiowym akcelerometrem, żyroskopem i magnetometrem oraz DMP) i czujnikiem ciśnienia BMP280. Komunikacja przez I2C. Waveshare 10 DOF IMU Sensor (D)
Brak towaru
Moduł z 6-osiowym czujnikiem IMU, który pozwala na pomiar przyspieszenia i prędkości obrotowej w zakresie do ±16g i ±2000dps. Wyposażony w złącze STEMMA QT, komunikuje się przez I2C lub SPI. Adafruit 4503
Brak towaru
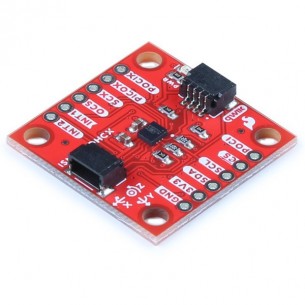
Moduł z 3-osiowym akcelerometrem i żyroskopem ISM330DHCX. Wyposażony w złącze Qwiic, komunikuje się przez interfejs I2C lub SPI. SparkFun SEN-19764
Moduł z 3-osiowym akcelerometrem i żyroskopem ISM330DHCX. Wyposażony w złącze Qwiic, komunikuje się przez interfejs I2C. SparkFun SEN-20176
Brak towaru
Moduł z czujnikiem przyspieszenia i prędkości obrotowej oparty na układzie LSM6DS3TR-C oraz magnetometrze LIS3MDL. Wyposażony w złącze STEMMA QT, komunikuje się przez interfejs I2C lub SPI. Adafruit 5543
Moduł z 9-osiowym IMU. Łączy układ ISM330DHCX (akcelerometr i żyroskop) i MMC5983MA (magnetometr). Komunikacja przez interfejs I2C. SparkFun SEN-19895
Brak towaru
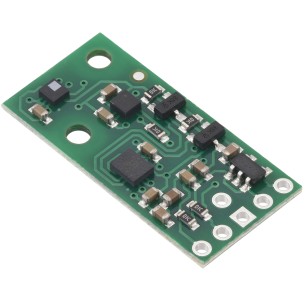
Niewielki moduł IMU 10 DoF z 3-osiowym żyroskopem i akcelerometrem (LSM6DSO), 3-osiowym magnetometrem (LIS3MDL) oraz barometrem (LPS22DF). Wyposażony jest w interfejs I2C, stabilizator napięcia oraz konwerter poziomów napięć. Pololu 2863
Niewielki moduł IMU 9 DoF z 3-osiowym żyroskopem i akcelerometrem (LSM6DSO) i 3-osiowym magnetometrem (LIS3MDL). Wyposażony jest w interfejs I2C, stabilizator napięcia oraz konwerter poziomów napięć. Pololu 2862
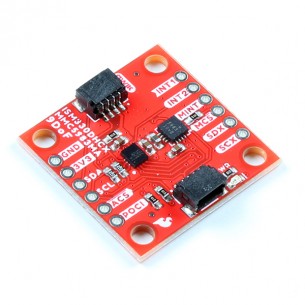
Moduł z 3-osiowym akcelerometrem i żyroskopem LSM6DSV16X. Jest energooszczędnym IMU zoptymalizowanym pod kątem urządzeń IoT z funkcjami przetwarzania danych z wykorzystaniem uczenia maszynowego. Wyposażony w złącze Qwiic, komunikuje się przez interfejs I2C. SparkFun SEN-21325
Brak towaru
Moduł z 3-osiowym akcelerometrem i żyroskopem LSM6DSV16X. Jest energooszczędnym IMU zoptymalizowanym pod kątem urządzeń IoT z funkcjami przetwarzania danych z wykorzystaniem uczenia maszynowego. Wyposażony w złącze Qwiic, komunikuje się przez interfejs I2C. SparkFun SEN-21336
Brak towaru
Moduł z 3-osiowym akcelerometrem i żyroskopem BMI270. Układ jest energooszczędnym IMU zoptymalizowanym pod kątem urządzeń typu wearables, zapewniającym precyzyjny pomiar przyspieszenia, pomiar prędkości kątowej i funkcje przerwania wyzwalane ruchem. Wyposażony w złącze Qwiic, komunikuje się przez interfejs I2C. SparkFun SEN-22397
Moduł z 3-osiowym akcelerometrem i żyroskopem BMI270. Układ jest energooszczędnym IMU zoptymalizowanym pod kątem urządzeń typu wearables, zapewniającym precyzyjny pomiar przyspieszenia, pomiar prędkości kątowej i funkcje przerwania wyzwalane ruchem. Wyposażony w złącze Qwiic, komunikuje się przez interfejs I2C. SparkFun SEN-22398
Brak towaru
Moduł z czujnikiem do zastosowania w obszarze wirtualnej rzeczywistości (VR). Został oparty o układ BNO086, który integruje akcelerometr, żyroskop oraz magnetometr oraz mikrokontroler z rdzeniem ARM Cortex M0+. SparkFun SEN-22857
Kompaktowy moduł z trzema czujnikami I2C, umożliwiający pomiar temperatury, wilgotności, ciśnienia, światła, zbliżenia oraz ruchu. Oferuje dwa złącza Qw/ST, dzięki czemu szybko podłączysz go do Raspberry Pi, Pico lub innych mikrokontrolerów. Idealny do aplikacji IoT, automatyki domowej i analizy środowiska w mobilnych lub stacjonarnych projektach. Pimoroni PIM745
Brak towaru
Moduł z czujnikiem przyspieszenia i prędkości obrotowej oparty na układzie LSM6DSO32. Wyposażony w złącze STEMMA QT, komunikuje się przez interfejs I2C, SPI lub I3C. Adafruit 4692