181,28 zł Netto
Moduł z 9-osiowym IMU. Łączy układ ISM330DHCX (akcelerometr i żyroskop) i MMC5983MA (magnetometr). Komunikacja przez interfejs I2C. SparkFun SEN-19895
Moduł z 9-osiowym IMU, który łączy układ ISM330DHCX (akcelerometr i żyroskop) i MMC5983MA (magnetometr). Czujnik ISM330DHCX zapewnia wysoką wydajność przy bardzo niskim poborze mocy i pozwala na pomiar przyspieszenia w zakresie ±2/±4/±8/±16g i prędkości kątowej w zakresie ±125/±250/±500/±1000/±2000/±4000dps. Wyposażony jest także w zestaw wbudowanych funkcje, w tym uczenie maszynowe, programowalny FSM, FIFO, koncentrator czujników, dekodowanie zdarzeń i przerwania. Czujnik MMC5983MA może mierzyć natężenie pola magnetycznego w pełnym zakresie skali ±8 Gauss (G), z rozdzielczością 0,25 mG/0,0625 mG na LSB w trybie pracy 16 bitów lub 18 bitów i całkowitym poziomem szumów RMS 0,4 mG. Komunikacja z modułem może być realizowana przez interfejs I2C (Qwiic). Na stronie produktu dostępny jest poradnik wraz z przykładami.
Cechy
Producent BTC Korporacja sp. z o. o. Lwowska 5 05-120 Legionowo Polska sprzedaz@kamami.pl 22 767 36 20
Osoba odpowiedzialna BTC Korporacja sp. z o. o. Lwowska 5 05-120 Legionowo Polska sprzedaz@kamami.pl 22 767 36 20
Cztero-żyłowy przewód o długości 500 mm zakończony z obu stron wtyczką Qwiic. Sparkfun PRT-14429
Brak towaru
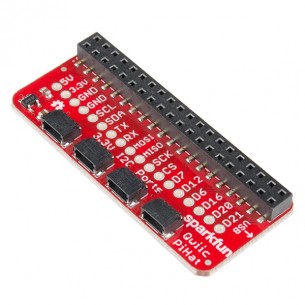
Rozszerzenie w postaci nakładki HAT przeznaczone do użycia z komputerem Raspberry Pi. Posiada cztery złącza Qwiic do których można podłączyć czujniki/moduły które wyposażone są w tego typu złącze. SparkFun DEV-14459
Przewód adaptera Qwiic do Grove o długości 100 mm. Umożliwia współdziałanie pomiędzy systemem SparkFun Qwiic Connect i płytami Grove opartymi na I2C firmy Seeed Studio. SparkFun PRT-15109
Elastyczny 4-żyłowy przewód o długości 50 mm zakończony z obu stron wtyczką Qwiic. Sparkfun PRT-17260
Brak towaru
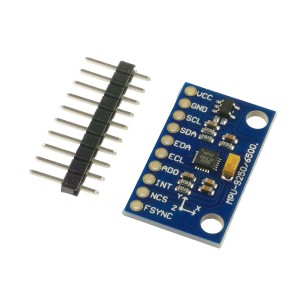
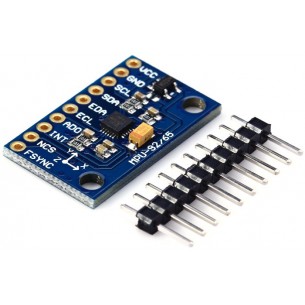
GY-9250 to moduł 9 Degrees of Freedom (9DoF) z układem MPU-9250 firmy InvenSense. Posiada wbudowany żyroskop, akcelerometr i magnetometr.
Brak towaru
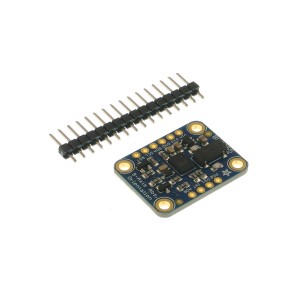
Moduł akcelerometru oraz żyroskopu, pozwala na pomiar przyspieszenia w zakresie do +/- 16 G oraz prędkości kątowej w zakresie do +/- 2000 dps. modMPU6500 (GY-6500)
BNO055 to jedno z najprostszych i najbardziej niezawodnych rozwiązań do pomiaru orientacji 3D. Eliminuje konieczność pisania i strojenia algorytmów fuzji sensorów, oferując stabilne i gotowe dane w czasie rzeczywistym. Idealnie sprawdzi się w robotyce, dronach, systemach stabilizacji, VR/AR, nawigacji oraz projektach edukacyjnych i prototypowych. Adafruit 2472
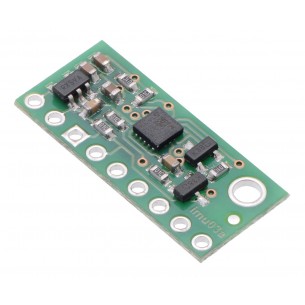
Moduł 3-osiowego akcelerometru oraz żyroskopu LSM6DS33 firmy ST o zakresie pomiaru od ±2 do ±16 g oraz od ±125°/s do ±2000°/s. Na złącza o rastrze 2,54mm wyprowadzono interfejsy I2C i SPI. Moduł jest kompatybilny z systemami o poziomach logicznych 2,5..5,5V. Pololu 2736
Pololu MiniIMU-9 v5 to niewielki moduł z 3-osiowym żyroskopem i akcelerometrem (LSM6DS33), 3-osiowym magnetometrem (LIS3MDL), interfejsem I2C, stabilizatorem napięcia oraz konwerterem poziomów logicznych. Pololu 2738
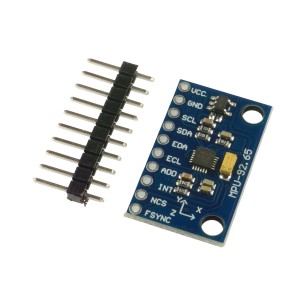
GY-9255 to moduł 9 Degrees of Freedom (9DoF) z układem MPU-9255 firmy InvenSense. Posiada wbudowany żyroskop, akcelerometr i magnetometr
Brak towaru
Redshift Labs UM7-LT to moduł zawierający 3-osiowy żyroskop, 3 osiowy- akcelerometr oraz 3-osiowy magnetometr. Może on pracować w systemie AHRS. Posiada wbudowany mikrokontroler który przy użyciu rozszerzonego filtru Kalmana oblicza orientacje. Pololu 2763
Redshift Labs UM7 to moduł zawierający 3-osiowy żyroskop, 3 osiowy- akcelerometr oraz 3-osiowy magnetometr. Może on pracować w systemie AHRS. Posiada wbudowany mikrokontroler, który przy użyciu rozszerzonego filtru Kalmana oblicza orientacje. Pololu 2764
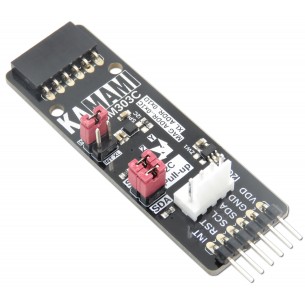
KAmodLSM303C to moduł z trójosiowym akcelerometrem i magnetometrem LSM303C firmy STMicroelectronics. Układ posiada cyfrowe wyjście sygnału (magistrala I2C lub SPI) i umożliwia pomiar przyspieszeń oraz wartości pola magnetycznego w trzech osiach.
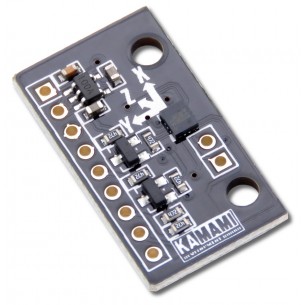
KAmodLSM6DS3 to moduł pozwalający na pomiar przyspieszenia oraz wartości prędkości kątowej. Ma wbudowany stabilizator napięcia oraz translatory poziomów na liniach SDA/SCL, dzięki czemu może być wykorzystany w systemach zasilanych napięciem 2,5-5,5V
Wszechstronny sensor 9DOF z akcelerometrem, magnetometrem i żyroskopem, obsługujący interfejsy I²C i SPI, umożliwiający precyzyjny pomiar ruchu, orientacji i temperatury, z łatwą integracją z Arduino i mikrokontrolerami. Adafruit 3387
Pmod NAV to moduł wyposażony w układ IMU 9DOF LSM9DS1 (akcelerometr, żyroskop, magnetometr) oraz w barometr (LPS25HB). Do komunikacji z modułem służy interfejs SPI. Digilent 410-326
Brak towaru
Moduł GY-87 to z moduł z czujnikami MPU6050, QMC5883L oraz BMP180, pozwalający na pomiar ruchu w dziewięciu osiach oraz pomiar ciśnienia atmosferycznego. Moduł ma wbudowany stabilizator napięcia 3,3 V
Brak towaru
Moduł GY-86 to z moduł z czujnikami MPU6050, HMC5883L oraz MS5611, pozwalający na pomiar ruchu w dziewięciu osiach oraz pomiar ciśnienia atmosferycznego. Moduł ma wbudowany stabilizator napięcia 3,3V. modGY-86
Moduł czujnika do zastosowania w obszarze wirtualnej rzeczywistości (VR). Został oparty o układ BNO080, który integruje akcelerometr, żyroskop oraz magnetometr z mikrokontrolerem z rdzeniem ARM Cortex M0+. SparkFun SEN-14686
Brak towaru
Moduł z czujnikiem przyspieszenia i prędkości obrotowej oparty na układzie MPU-6050. Komunikuje się przez interfejs I2C. DFRobot SEN0142
Brak towaru
Moduł z 9-osiowym IMU. Łączy układ ISM330DHCX (akcelerometr i żyroskop) i MMC5983MA (magnetometr). Komunikacja przez interfejs I2C. SparkFun SEN-19895