



172,83 zł Netto
BNO055 to jedno z najprostszych i najbardziej niezawodnych rozwiązań do pomiaru orientacji 3D. Eliminuje konieczność pisania i strojenia algorytmów fuzji sensorów, oferując stabilne i gotowe dane w czasie rzeczywistym. Idealnie sprawdzi się w robotyce, dronach, systemach stabilizacji, VR/AR, nawigacji oraz projektach edukacyjnych i prototypowych. Adafruit 2472
Zaawansowany , 9-osiowy moduł IMU (akcelerometr + żyroskop + magnetometr), który samodzielnie wykonuje fuzję danych. W przeciwieństwie do klasycznych czujników 9-DOF, BNO055 posiada wbudowany mikrokontroler ARM Cortex-M0, który przelicza surowe dane na gotową orientację przestrzenną.
Dzięki temu użytkownik otrzymuje bezpośrednio orientację w 3D (kąty Eulera lub kwaterniony), wektory przyspieszeń, prędkości kątowe czy wektor grawitacji – bez konieczności implementowania skomplikowanych algorytmów. Komunikacja odbywa się przez I²C, co pozwala uruchomić moduł w kilka minut, nawet na prostych mikrokontrolerach (Arduino, ESP, Raspberry Pi).
Przewody połączeniowe i mikrokontroler nie są dołączone
Cechy
Producent BTC Korporacja sp. z o. o. Lwowska 5 05-120 Legionowo Polska sprzedaz@kamami.pl 22 767 36 20
Osoba odpowiedzialna BTC Korporacja sp. z o. o. Lwowska 5 05-120 Legionowo Polska sprzedaz@kamami.pl 22 767 36 20
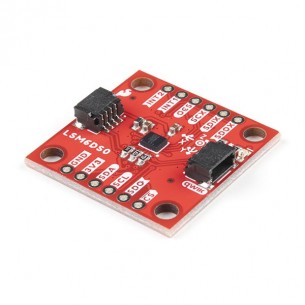
Moduł z 6-osiowym czujnikiem IMU LSM6DSO, który łączy 3-osiowy akcelerometr i żyroskop oraz bufor FIFO o pojemności 9 kB i funkcje obsługi zdarzeń. Komunikuje się przez I2C lub SPI. SparkFun SEN-18020
Moduł z 9-osiowym czujnikiem IMU ICM-20948, zintegrowanym 3-osiowym akcelerometrem, żyroskopem i magnetometrem oraz cyfrowym procesorem ruchu DMP (Digital Motion Processor). Komunikacja przez I2C. Pimoroni PIM448
Brak towaru
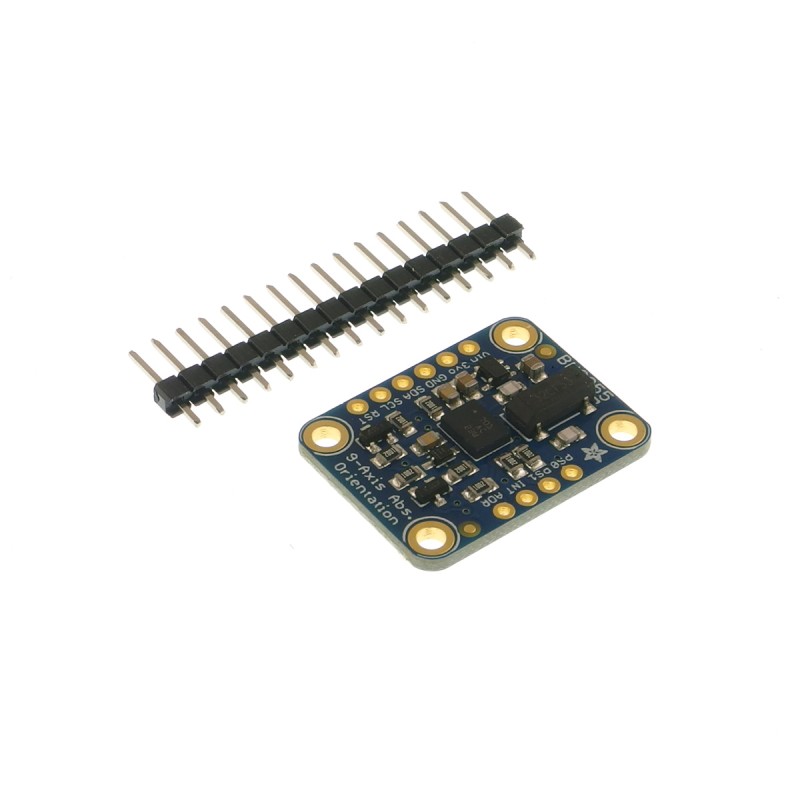
Moduł z 9-osiowym czujnikiem IMU BNO055. Ma wbudowany układ przetwarzający, który zwraca dane jako orientację w przestrzeni 3D. Komunikuje się przez I2C. Adafruit 4646
Brak towaru
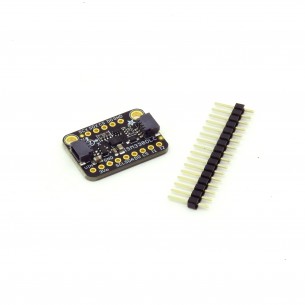
Moduł z 3-osiowym akcelerometrem i żyroskopem ISM330DHCX. Wyposażony w złącze STEMMA QT, komunikuje się przez interfejs I2C lub SPI. Adafruit 4502
Moduł z 9-osiowym czujnikiem IMU ICM-20948. Układ to zintegrowany 3-osiowy akcelerometr, żyroskop i magnetometr oraz cyfrowy procesor ruchu DMP (Digital Motion Processor). Komunikacja przez I2C lub SPI. Adafruit 4554
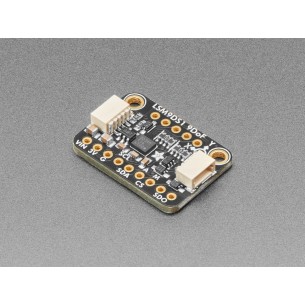
Moduł z czujnikiem przyspieszenia i prędkości obrotowej oparty na układzie LSM6DSOX. Wyposażony w złącze STEMMA QT, komunikuje się przez interfejs I2C, SPI lub I3C. Adafruit 4438
Moduł z czujnikiem przyspieszenia i prędkości obrotowej oparty na układzie MPU-6050. Wyposażony w złącze STEMMA QT, komunikuje się przez interfejs I2C. Adafruit 3886
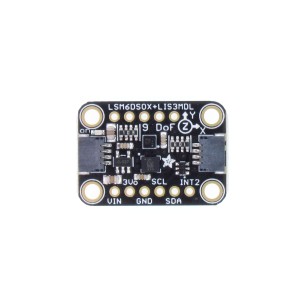
Moduł z czujnikiem przyspieszenia i prędkości obrotowej oparty na układzie LSM6DSOX oraz magnetometrze LIS3MDL. Wyposażony w złącze STEMMA QT, komunikuje się przez interfejs I2C, SPI lub I3C. Adafruit 4517
Moduł z czujnikiem przyspieszenia i prędkości obrotowej oparty na układzie LSM6DSO32. Wyposażony w złącze STEMMA QT, komunikuje się przez interfejs I2C, SPI lub I3C. Adafruit 4692
Moduł z 6-osiowym czujnikiem IMU, który pozwala na pomiar przyspieszenia i prędkości obrotowej w szerokim zakresie ±30g i ±4000dps. Komunikuje się przez I2C. Adafruit 4464
Brak towaru
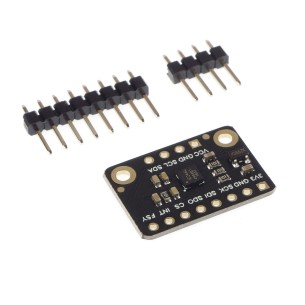
Kompaktowy czujnik 9-DOF, łączący 3-osiowy akcelerometr, magnetometr i żyroskop, umożliwiający precyzyjne określenie orientacji obiektu. Dzięki wsparciu dla magistrali I2C/SPI, kompatybilności z systemem STEMMA QT oraz zasilaniu 3V/5V, znajduje zastosowanie w projektach robotyki, nawigacji 3D, VR, AR oraz systemach stabilizacji. Adafruit 4634
Brak towaru
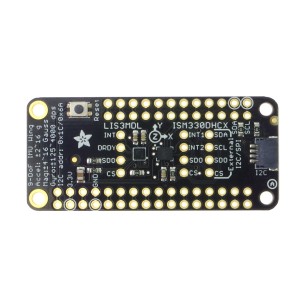
Moduł z 9-osiowym IMU dedykowany do płytek Feather. Łączy układ ISM330DHCX (akcelerometr i żyroskop) i LIS3MDL (magnetometr). Komunikacja przez interfejs I2C. Adafruit 4569
Moduł z czujnikiem przyspieszenia i prędkości obrotowej oparty na układzie MPU6050. Komunikuje się przez interfejs I2C lub UART
Brak towaru
Moduł z czujnikiem przyspieszenia i prędkości obrotowej oparty na układzie ICG-20660L. Komunikuje się przez interfejs I2C lub SPI. DFRobot SEN0443
Moduł z 9-osiowym czujnikiem IMU ICM-20948 (3-osiowym akcelerometrem, żyroskopem i magnetometrem oraz DMP) i czujnikiem ciśnienia BMP280. Komunikacja przez I2C. Waveshare 10 DOF IMU Sensor (D)
Brak towaru
Moduł z 6-osiowym czujnikiem IMU, który pozwala na pomiar przyspieszenia i prędkości obrotowej w zakresie do ±16g i ±2000dps. Wyposażony w złącze STEMMA QT, komunikuje się przez I2C lub SPI. Adafruit 4503
BNO055 to jedno z najprostszych i najbardziej niezawodnych rozwiązań do pomiaru orientacji 3D. Eliminuje konieczność pisania i strojenia algorytmów fuzji sensorów, oferując stabilne i gotowe dane w czasie rzeczywistym. Idealnie sprawdzi się w robotyce, dronach, systemach stabilizacji, VR/AR, nawigacji oraz projektach edukacyjnych i prototypowych. Adafruit 2472