41,11 zł Netto
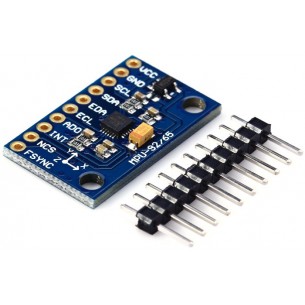
Moduł z czujnikiem przyspieszenia i prędkości obrotowej oparty na układzie MPU6050. Komunikuje się przez interfejs I2C lub UART
Moduł 6 DoF z 3-osiowym akcelerometrem i 3-osiowym żyroskopem oparty na układzie MPU6050. Umożliwia pomiar przyspieszenia liniowego z programowalnym zakresem ±2g, ±4g, ±8g lub ±16g oraz prędkości obrotowej z zakresem ±250, ±500, ±1000 lub ±2000°/s, co pozwala na określenie orientacji w przestrzeni. Sprawdzi się m.in. w projektach robotów mobilnych czy obiektów latających (UAV). Moduł jest kompatybilny z kontrolerami 3,3 V oraz 5 V, a komunikacja odbywa się przez interfejs I2C lub UART. Moduł na złącza krawędziowe, dzięki czemu może być przylutowany na innej płytce jak element SMD.
Cechy
Producent BTC Korporacja sp. z o. o. Lwowska 5 05-120 Legionowo Polska sprzedaz@kamami.pl 22 767 36 20
Osoba odpowiedzialna BTC Korporacja sp. z o. o. Lwowska 5 05-120 Legionowo Polska sprzedaz@kamami.pl 22 767 36 20
Konwerter UART - USB oparty na układzie FT232RL z liniami TX, RX, RTS i CTS wyprowadzonymi na złącze szpilkowe, pozostałe linie dostępne na polach lutowniczych dla złącz szpilkowych. Wtyk USB typ A. Zasilanie napięciem od 3,3 do 5 V. Waveshare FT232 USB UART Board (Type A)
Moduł 10 DoF z akcelerometrem ADXL345, magnetometrem HMC5883L, żyroskopem ITG-3205 i barometrem BMP280. Komunikacja przez interfejs I2C. DFRobot SEN0140
Brak towaru
Konwerter USB - UART oparty na układzie FT232RL. Kompatybilny z napięciami 3,3 V oraz 5 V, został wyposażony w złącze USB typu C. Waveshare FT232 USB UART Board (Type C)
Konwerter USB - UART oparty na układzie CP2102. Kompatybilny z napięciem 3,3 V, został wyposażony w złącze USB typu C. Waveshare CP2102 USB UART Board (Type C)
Brak towaru
GY-801 to moduł 9DOF IMU z układami L3G4200D, ADXL345, MMC5883MA oraz BMP180. Pozwala na pomiar ruchu obiektu oraz cisnienia atmosferycznego.
GY-9250 to moduł 9 Degrees of Freedom (9DoF) z układem MPU-9250 firmy InvenSense. Posiada wbudowany żyroskop, akcelerometr i magnetometr.
Brak towaru
Moduł akcelerometru oraz żyroskopu, pozwala na pomiar przyspieszenia w zakresie do +/- 16 G oraz prędkości kątowej w zakresie do +/- 2000 dps. modMPU6500 (GY-6500)
BNO055 to jedno z najprostszych i najbardziej niezawodnych rozwiązań do pomiaru orientacji 3D. Eliminuje konieczność pisania i strojenia algorytmów fuzji sensorów, oferując stabilne i gotowe dane w czasie rzeczywistym. Idealnie sprawdzi się w robotyce, dronach, systemach stabilizacji, VR/AR, nawigacji oraz projektach edukacyjnych i prototypowych. Adafruit 2472
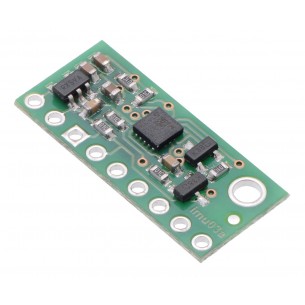
Moduł 3-osiowego akcelerometru oraz żyroskopu LSM6DS33 firmy ST o zakresie pomiaru od ±2 do ±16 g oraz od ±125°/s do ±2000°/s. Na złącza o rastrze 2,54mm wyprowadzono interfejsy I2C i SPI. Moduł jest kompatybilny z systemami o poziomach logicznych 2,5..5,5V. Pololu 2736
Pololu MiniIMU-9 v5 to niewielki moduł z 3-osiowym żyroskopem i akcelerometrem (LSM6DS33), 3-osiowym magnetometrem (LIS3MDL), interfejsem I2C, stabilizatorem napięcia oraz konwerterem poziomów logicznych. Pololu 2738
GY-9255 to moduł 9 Degrees of Freedom (9DoF) z układem MPU-9255 firmy InvenSense. Posiada wbudowany żyroskop, akcelerometr i magnetometr
Brak towaru
Redshift Labs UM7-LT to moduł zawierający 3-osiowy żyroskop, 3 osiowy- akcelerometr oraz 3-osiowy magnetometr. Może on pracować w systemie AHRS. Posiada wbudowany mikrokontroler który przy użyciu rozszerzonego filtru Kalmana oblicza orientacje. Pololu 2763
Redshift Labs UM7 to moduł zawierający 3-osiowy żyroskop, 3 osiowy- akcelerometr oraz 3-osiowy magnetometr. Może on pracować w systemie AHRS. Posiada wbudowany mikrokontroler, który przy użyciu rozszerzonego filtru Kalmana oblicza orientacje. Pololu 2764
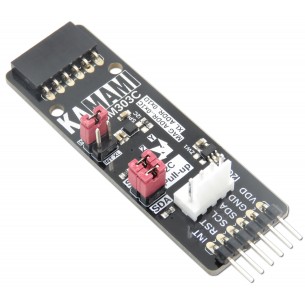
KAmodLSM303C to moduł z trójosiowym akcelerometrem i magnetometrem LSM303C firmy STMicroelectronics. Układ posiada cyfrowe wyjście sygnału (magistrala I2C lub SPI) i umożliwia pomiar przyspieszeń oraz wartości pola magnetycznego w trzech osiach.
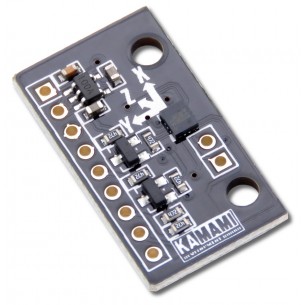
KAmodLSM6DS3 to moduł pozwalający na pomiar przyspieszenia oraz wartości prędkości kątowej. Ma wbudowany stabilizator napięcia oraz translatory poziomów na liniach SDA/SCL, dzięki czemu może być wykorzystany w systemach zasilanych napięciem 2,5-5,5V
Wszechstronny sensor 9DOF z akcelerometrem, magnetometrem i żyroskopem, obsługujący interfejsy I²C i SPI, umożliwiający precyzyjny pomiar ruchu, orientacji i temperatury, z łatwą integracją z Arduino i mikrokontrolerami. Adafruit 3387
Pmod NAV to moduł wyposażony w układ IMU 9DOF LSM9DS1 (akcelerometr, żyroskop, magnetometr) oraz w barometr (LPS25HB). Do komunikacji z modułem służy interfejs SPI. Digilent 410-326
Brak towaru
Moduł GY-87 to z moduł z czujnikami MPU6050, QMC5883L oraz BMP180, pozwalający na pomiar ruchu w dziewięciu osiach oraz pomiar ciśnienia atmosferycznego. Moduł ma wbudowany stabilizator napięcia 3,3 V
Brak towaru
Moduł GY-86 to z moduł z czujnikami MPU6050, HMC5883L oraz MS5611, pozwalający na pomiar ruchu w dziewięciu osiach oraz pomiar ciśnienia atmosferycznego. Moduł ma wbudowany stabilizator napięcia 3,3V. modGY-86
Moduł czujnika do zastosowania w obszarze wirtualnej rzeczywistości (VR). Został oparty o układ BNO080, który integruje akcelerometr, żyroskop oraz magnetometr z mikrokontrolerem z rdzeniem ARM Cortex M0+. SparkFun SEN-14686
Brak towaru
Moduł z czujnikiem przyspieszenia i prędkości obrotowej oparty na układzie MPU6050. Komunikuje się przez interfejs I2C lub UART