- bez obudowy")
 - bez obudowy")
 - bez obudowy - widok na złącza")
 - bez obudowy")

597,51 zł Netto
Redshift Labs UM7-LT to moduł zawierający 3-osiowy żyroskop, 3 osiowy- akcelerometr oraz 3-osiowy magnetometr. Może on pracować w systemie AHRS. Posiada wbudowany mikrokontroler który przy użyciu rozszerzonego filtru Kalmana oblicza orientacje. Pololu 2763
Czujnik Redshift Labs UM7-LT to czujnik orientacji posiadający 3-osiowy żyroskop, 3-osiowy akcelerometr oraz 3-osiowy magnetometr. Może pracować jako system AHRS (Attitude and Heading Reference System). W porównaniu do innych czujników IMU tego typu oprócz surowych danych podaje również orientacje w postaci kątów Eurera. UM7 posiada wbudowany mikrokontroler który pozwala przy wykorzystaniu rozszerzonego filtru Kalmana (Extended Kalman Filter) wyliczyć orientacje czujnika nawet do 500 razy na sekundę.
Dostępna jest również wersja czujnika z obudową - Redshift Labs UM7
Moduł UM7 posiada szereg udoskonaleń w stosunku do swojego poprzednika UM6, m.in. większą stabilność żyroskopu oraz mniejsze szumy. Nowy interfejs komunikacyjny zapewnia większą elastyczność. Dodatkowo wspiera kompensacje temperaturową na wszystkich czujnikach. Czujnik wykorzystuje technologie MEMS (micro-electro-mechanical systems) która oferuje większą wydajność.
Moduł do komunikacji wykorzystuje interfejs UART, zostało one wyprowadzone w postaci 5 pinowego złącza. Drugie 6 pinowe złącze znajdujące się na module, może być wykorzystane do podłączenia opcjonalnego modułu GPS ( LS20031)
Uwaga
Aby podłączyć czujnik Redshift Labs UM7 do komputera potrzebny jest konwerter USB- UART.
Do konfiguracji oraz odczytu danych z czujnika może służyć dedykowany program Redshift Serial Interface. Pozwala on na logowanie danych, tworzenie wykresów w czasie rzeczywistym, oraz łatwą konfiguracje modułu.
Cechy
Producent BTC Korporacja sp. z o. o. Lwowska 5 05-120 Legionowo Polska sprzedaz@kamami.pl 22 767 36 20
Osoba odpowiedzialna BTC Korporacja sp. z o. o. Lwowska 5 05-120 Legionowo Polska sprzedaz@kamami.pl 22 767 36 20
Redshift Labs UM7 to moduł zawierający 3-osiowy żyroskop, 3 osiowy- akcelerometr oraz 3-osiowy magnetometr. Może on pracować w systemie AHRS. Posiada wbudowany mikrokontroler, który przy użyciu rozszerzonego filtru Kalmana oblicza orientacje. Pololu 2764
Moduł 10 DoF z akcelerometrem ADXL345, magnetometrem HMC5883L, żyroskopem ITG-3205 i barometrem BMP280. Komunikacja przez interfejs I2C. DFRobot SEN0140
Brak towaru
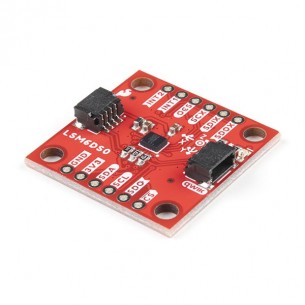
Moduł z 6-osiowym czujnikiem IMU LSM6DSO, który łączy 3-osiowy akcelerometr i żyroskop oraz bufor FIFO o pojemności 9 kB i funkcje obsługi zdarzeń. Komunikuje się przez I2C lub SPI. SparkFun SEN-18020
Moduł z 9-osiowym czujnikiem IMU ICM-20948, zintegrowanym 3-osiowym akcelerometrem, żyroskopem i magnetometrem oraz cyfrowym procesorem ruchu DMP (Digital Motion Processor). Komunikacja przez I2C. Pimoroni PIM448
Brak towaru
Moduł z 9-osiowym czujnikiem IMU BNO055. Ma wbudowany układ przetwarzający, który zwraca dane jako orientację w przestrzeni 3D. Komunikuje się przez I2C. Adafruit 4646
Brak towaru
Moduł z 3-osiowym akcelerometrem i żyroskopem ISM330DHCX. Wyposażony w złącze STEMMA QT, komunikuje się przez interfejs I2C lub SPI. Adafruit 4502
Moduł z 9-osiowym czujnikiem IMU ICM-20948. Układ to zintegrowany 3-osiowy akcelerometr, żyroskop i magnetometr oraz cyfrowy procesor ruchu DMP (Digital Motion Processor). Komunikacja przez I2C lub SPI. Adafruit 4554
Moduł z czujnikiem przyspieszenia i prędkości obrotowej oparty na układzie LSM6DSOX. Wyposażony w złącze STEMMA QT, komunikuje się przez interfejs I2C, SPI lub I3C. Adafruit 4438
Moduł z czujnikiem przyspieszenia i prędkości obrotowej oparty na układzie MPU-6050. Wyposażony w złącze STEMMA QT, komunikuje się przez interfejs I2C. Adafruit 3886
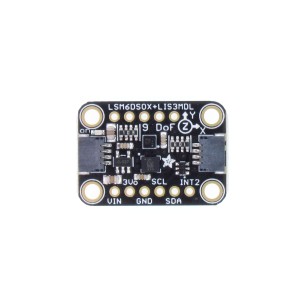
Moduł z czujnikiem przyspieszenia i prędkości obrotowej oparty na układzie LSM6DSOX oraz magnetometrze LIS3MDL. Wyposażony w złącze STEMMA QT, komunikuje się przez interfejs I2C, SPI lub I3C. Adafruit 4517
Moduł z czujnikiem przyspieszenia i prędkości obrotowej oparty na układzie LSM6DSO32. Wyposażony w złącze STEMMA QT, komunikuje się przez interfejs I2C, SPI lub I3C. Adafruit 4692
Moduł z 6-osiowym czujnikiem IMU, który pozwala na pomiar przyspieszenia i prędkości obrotowej w szerokim zakresie ±30g i ±4000dps. Komunikuje się przez I2C. Adafruit 4464
Brak towaru
Kompaktowy czujnik 9-DOF, łączący 3-osiowy akcelerometr, magnetometr i żyroskop, umożliwiający precyzyjne określenie orientacji obiektu. Dzięki wsparciu dla magistrali I2C/SPI, kompatybilności z systemem STEMMA QT oraz zasilaniu 3V/5V, znajduje zastosowanie w projektach robotyki, nawigacji 3D, VR, AR oraz systemach stabilizacji. Adafruit 4634
Brak towaru
Moduł z 9-osiowym IMU dedykowany do płytek Feather. Łączy układ ISM330DHCX (akcelerometr i żyroskop) i LIS3MDL (magnetometr). Komunikacja przez interfejs I2C. Adafruit 4569
Moduł z czujnikiem przyspieszenia i prędkości obrotowej oparty na układzie MPU6050. Komunikuje się przez interfejs I2C lub UART
Brak towaru
Moduł z czujnikiem przyspieszenia i prędkości obrotowej oparty na układzie ICG-20660L. Komunikuje się przez interfejs I2C lub SPI. DFRobot SEN0443
Moduł z 9-osiowym czujnikiem IMU ICM-20948 (3-osiowym akcelerometrem, żyroskopem i magnetometrem oraz DMP) i czujnikiem ciśnienia BMP280. Komunikacja przez I2C. Waveshare 10 DOF IMU Sensor (D)
Brak towaru
Redshift Labs UM7-LT to moduł zawierający 3-osiowy żyroskop, 3 osiowy- akcelerometr oraz 3-osiowy magnetometr. Może on pracować w systemie AHRS. Posiada wbudowany mikrokontroler który przy użyciu rozszerzonego filtru Kalmana oblicza orientacje. Pololu 2763