


85,19 zł Netto
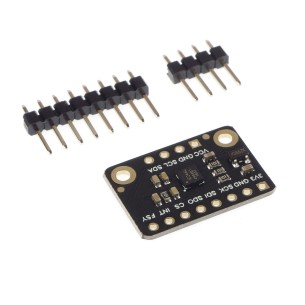
Moduł z czujnikiem przyspieszenia i prędkości obrotowej oparty na układzie LSM6DSOX oraz magnetometrze LIS3MDL. Wyposażony w złącze STEMMA QT, komunikuje się przez interfejs I2C, SPI lub I3C. Adafruit 4517
Moduł 9 DoF z 3-osiowym akcelerometrem i 3-osiowym żyroskopem oparty na układzie LSM6DSOX oraz 3-osiowym magnetometrze LIS3MDL. LSM6DSOX pozwala na pomiar przyspieszenia względem Ziemii oraz prędkości obrotowej, a LIS3MDL pola magnetycznego, co umożliwia określenie orientacji w przestrzeni. Ma wbudowane wykrywanie uderzeń, aktywności, krokomierz oraz programowalną maszynę stanów i moduł uczenia maszynowego, który może wykonywać podstawowe rozpoznawanie gestów. Sprawdzi się m.in. w projektach robotów mobilnych czy obiektów latających (UAV). Moduł jest kompatybilny z kontrolerami 3,3 V oraz 5 V, a komunikacja odbywa się przez interfejs I2C (złącze STEMMA QT) lub SPI. Układ LSM6DSOX wspiera także interfejs MIPI I3C. Pełna dokumentacja dostępna jest na stronie produktu.
LSM6DSOX
LIS3MDL
Ogólne
Cechy
Producent BTC Korporacja sp. z o. o. Lwowska 5 05-120 Legionowo Polska sprzedaz@kamami.pl 22 767 36 20
Osoba odpowiedzialna BTC Korporacja sp. z o. o. Lwowska 5 05-120 Legionowo Polska sprzedaz@kamami.pl 22 767 36 20
4-żyłowy przewód o długości 50 mm. Zakończony z obu stron wtyczką STEMMA QT (Qwiic). Adafruit 4399
Brak towaru
4-żyłowy przewód o długości 100 mm. Zakończony z obu stron wtyczką STEMMA QT (Qwiic). Adafruit 4210
4-żyłowy przewód o długości 200 mm. Zakończony z obu stron wtyczką STEMMA QT (Qwiic). Adafruit 4401
4-żyłowy przewód o długości 300 mm. Zakończony z obu stron wtyczką STEMMA QT (Qwiic). Adafruit 5384
Brak towaru
4-żyłowy przewód o długości 400 mm. Zakończony z obu stron wtyczką STEMMA QT (Qwiic). Adafruit 5385
Moduł z czujnikiem przyspieszenia i prędkości obrotowej oparty na układzie MPU6050. Komunikuje się przez interfejs I2C lub UART
Brak towaru
Moduł z czujnikiem przyspieszenia i prędkości obrotowej oparty na układzie ICG-20660L. Komunikuje się przez interfejs I2C lub SPI. DFRobot SEN0443
Moduł z 9-osiowym czujnikiem IMU ICM-20948 (3-osiowym akcelerometrem, żyroskopem i magnetometrem oraz DMP) i czujnikiem ciśnienia BMP280. Komunikacja przez I2C. Waveshare 10 DOF IMU Sensor (D)
Brak towaru
Moduł z 6-osiowym czujnikiem IMU, który pozwala na pomiar przyspieszenia i prędkości obrotowej w zakresie do ±16g i ±2000dps. Wyposażony w złącze STEMMA QT, komunikuje się przez I2C lub SPI. Adafruit 4503
Brak towaru
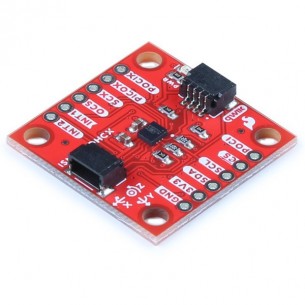
Moduł z 3-osiowym akcelerometrem i żyroskopem ISM330DHCX. Wyposażony w złącze Qwiic, komunikuje się przez interfejs I2C lub SPI. SparkFun SEN-19764
Moduł z 3-osiowym akcelerometrem i żyroskopem ISM330DHCX. Wyposażony w złącze Qwiic, komunikuje się przez interfejs I2C. SparkFun SEN-20176
Brak towaru
Moduł z czujnikiem przyspieszenia i prędkości obrotowej oparty na układzie LSM6DS3TR-C oraz magnetometrze LIS3MDL. Wyposażony w złącze STEMMA QT, komunikuje się przez interfejs I2C lub SPI. Adafruit 5543
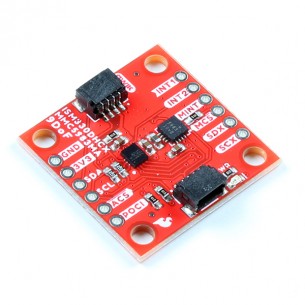
Moduł z 9-osiowym IMU. Łączy układ ISM330DHCX (akcelerometr i żyroskop) i MMC5983MA (magnetometr). Komunikacja przez interfejs I2C. SparkFun SEN-19895
Brak towaru
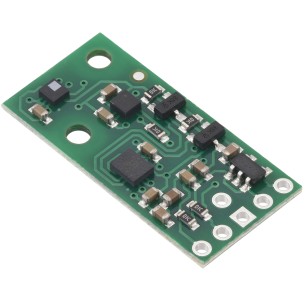
Niewielki moduł IMU 10 DoF z 3-osiowym żyroskopem i akcelerometrem (LSM6DSO), 3-osiowym magnetometrem (LIS3MDL) oraz barometrem (LPS22DF). Wyposażony jest w interfejs I2C, stabilizator napięcia oraz konwerter poziomów napięć. Pololu 2863
Niewielki moduł IMU 9 DoF z 3-osiowym żyroskopem i akcelerometrem (LSM6DSO) i 3-osiowym magnetometrem (LIS3MDL). Wyposażony jest w interfejs I2C, stabilizator napięcia oraz konwerter poziomów napięć. Pololu 2862
Moduł z 3-osiowym akcelerometrem i żyroskopem LSM6DSV16X. Jest energooszczędnym IMU zoptymalizowanym pod kątem urządzeń IoT z funkcjami przetwarzania danych z wykorzystaniem uczenia maszynowego. Wyposażony w złącze Qwiic, komunikuje się przez interfejs I2C. SparkFun SEN-21325
Brak towaru
Moduł z 3-osiowym akcelerometrem i żyroskopem LSM6DSV16X. Jest energooszczędnym IMU zoptymalizowanym pod kątem urządzeń IoT z funkcjami przetwarzania danych z wykorzystaniem uczenia maszynowego. Wyposażony w złącze Qwiic, komunikuje się przez interfejs I2C. SparkFun SEN-21336
Brak towaru
Moduł z 3-osiowym akcelerometrem i żyroskopem BMI270. Układ jest energooszczędnym IMU zoptymalizowanym pod kątem urządzeń typu wearables, zapewniającym precyzyjny pomiar przyspieszenia, pomiar prędkości kątowej i funkcje przerwania wyzwalane ruchem. Wyposażony w złącze Qwiic, komunikuje się przez interfejs I2C. SparkFun SEN-22397
Moduł z 3-osiowym akcelerometrem i żyroskopem BMI270. Układ jest energooszczędnym IMU zoptymalizowanym pod kątem urządzeń typu wearables, zapewniającym precyzyjny pomiar przyspieszenia, pomiar prędkości kątowej i funkcje przerwania wyzwalane ruchem. Wyposażony w złącze Qwiic, komunikuje się przez interfejs I2C. SparkFun SEN-22398
Brak towaru
Moduł z czujnikiem do zastosowania w obszarze wirtualnej rzeczywistości (VR). Został oparty o układ BNO086, który integruje akcelerometr, żyroskop oraz magnetometr oraz mikrokontroler z rdzeniem ARM Cortex M0+. SparkFun SEN-22857
Kompaktowy moduł z trzema czujnikami I2C, umożliwiający pomiar temperatury, wilgotności, ciśnienia, światła, zbliżenia oraz ruchu. Oferuje dwa złącza Qw/ST, dzięki czemu szybko podłączysz go do Raspberry Pi, Pico lub innych mikrokontrolerów. Idealny do aplikacji IoT, automatyki domowej i analizy środowiska w mobilnych lub stacjonarnych projektach. Pimoroni PIM745
Brak towaru
Moduł z czujnikiem przyspieszenia i prędkości obrotowej oparty na układzie LSM6DSOX oraz magnetometrze LIS3MDL. Wyposażony w złącze STEMMA QT, komunikuje się przez interfejs I2C, SPI lub I3C. Adafruit 4517