



92,79 zł Netto
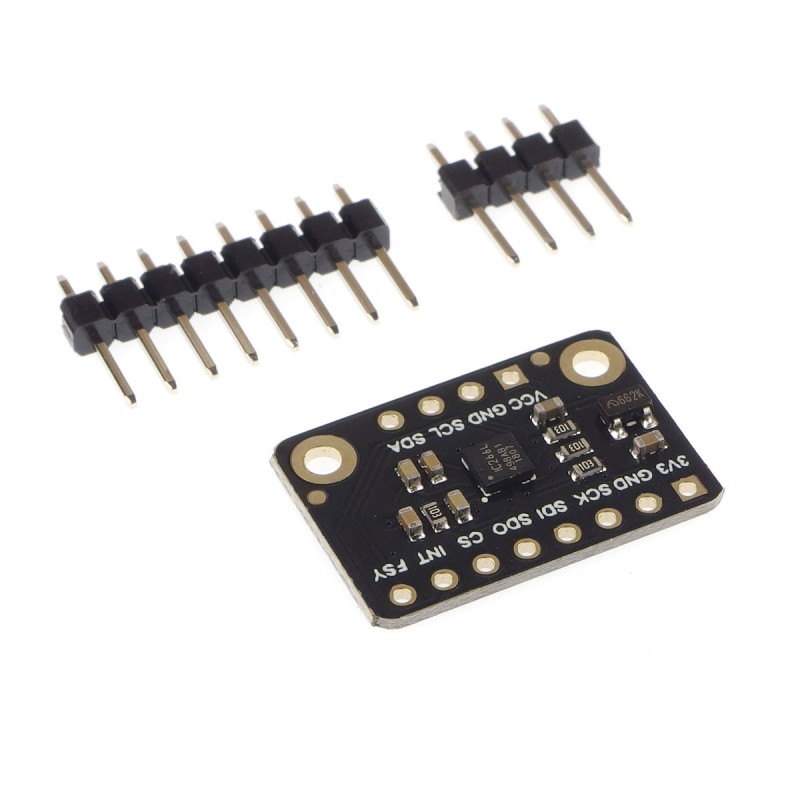
Moduł z czujnikiem przyspieszenia i prędkości obrotowej oparty na układzie ICG-20660L. Komunikuje się przez interfejs I2C lub SPI. DFRobot SEN0443
Moduł 6 DoF z 3-osiowym akcelerometrem i 3-osiowym żyroskopem oparty na układzie ICG-20660L. Umożliwia pomiar przyspieszenia z programowalnym zakresem ±2g, ±4g, ±8g lub ±16g oraz prędkości obrotowej z zakresem ±125, ±250 lub ±500°/s, co pozwala na określenie orientacji w przestrzeni. Czujnik wyróżnia się bardzo dużą dokładnością i czułością. Sprawdzi się m.in. w projektach robotów mobilnych czy obiektów latających (UAV). Moduł jest kompatybilny z kontrolerami 3,3 V, a komunikacja odbywa się przez interfejs I2C lub SPI. Pełna dokumentacja wraz z przykładami użycia dostępne są na stronie Wiki produktu.
Cechy
Producent BTC Korporacja sp. z o. o. Lwowska 5 05-120 Legionowo Polska sprzedaz@kamami.pl 22 767 36 20
Osoba odpowiedzialna BTC Korporacja sp. z o. o. Lwowska 5 05-120 Legionowo Polska sprzedaz@kamami.pl 22 767 36 20
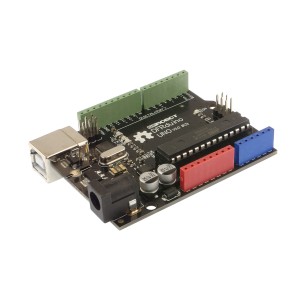
Arduino Uno Rev3 to popularna płytka z mikrokontrolerem Atmel ATmega328 z rodziny AVR, do dyspozycji użytkownika jest 14 linii I/O, 6 kanałów PWM, 6 wejść analogowych. Dodatkowy mikrokontroler ATmega16U4 realizuje komunikację przez interfejs USB. Arduino A000066
DFRduino UNO R3 to płytka bazowa kompatybilna z Arduino. Płytka posiada mikrokontroler ATmega 328P. Do dyspozycji użytkownika jest 14 portów GPIO (wejść/wyjść) z czego 6 może generować sygnał PWM. DFRobot DFR0216
Moduł z czujnikiem przyspieszenia i prędkości obrotowej oparty na układzie MPU-6050. Komunikuje się przez interfejs I2C. DFRobot SEN0142
Brak towaru
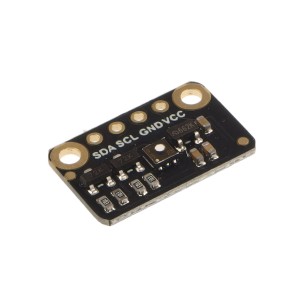
Moduł czujnika jakości powietrza oparty na układzie SGP40. Komunikuje się przez interfejs I2C. DFRobot SEN0392
Moduł 10 DoF z akcelerometrem ADXL345, magnetometrem HMC5883L, żyroskopem ITG-3205 i barometrem BMP280. Komunikacja przez interfejs I2C. DFRobot SEN0140
Brak towaru
Moduł z czujnikiem BME680 do pomiaru stężenia lotnych związków organicznych (VOC), ciśnienia, temperatury oraz wilgotności. Komunikacja I2C lub SPI. DFRobot SEN0375
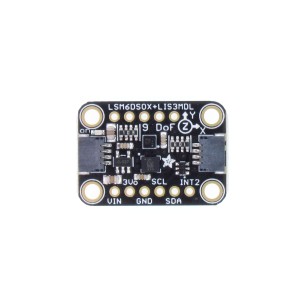
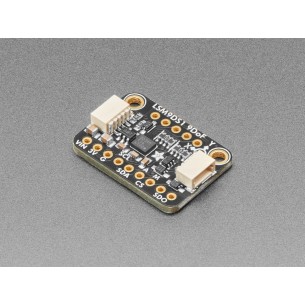
Moduł z czujnikiem przyspieszenia i prędkości obrotowej oparty na układzie LSM6DSOX oraz magnetometrze LIS3MDL. Wyposażony w złącze STEMMA QT, komunikuje się przez interfejs I2C, SPI lub I3C. Adafruit 4517
Moduł z czujnikiem przyspieszenia i prędkości obrotowej oparty na układzie LSM6DSO32. Wyposażony w złącze STEMMA QT, komunikuje się przez interfejs I2C, SPI lub I3C. Adafruit 4692
Moduł z 6-osiowym czujnikiem IMU, który pozwala na pomiar przyspieszenia i prędkości obrotowej w szerokim zakresie ±30g i ±4000dps. Komunikuje się przez I2C. Adafruit 4464
Brak towaru
Kompaktowy czujnik 9-DOF, łączący 3-osiowy akcelerometr, magnetometr i żyroskop, umożliwiający precyzyjne określenie orientacji obiektu. Dzięki wsparciu dla magistrali I2C/SPI, kompatybilności z systemem STEMMA QT oraz zasilaniu 3V/5V, znajduje zastosowanie w projektach robotyki, nawigacji 3D, VR, AR oraz systemach stabilizacji. Adafruit 4634
Brak towaru
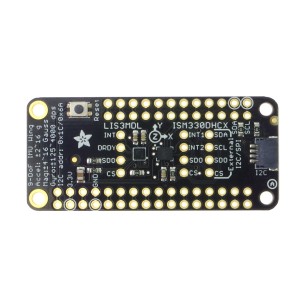
Moduł z 9-osiowym IMU dedykowany do płytek Feather. Łączy układ ISM330DHCX (akcelerometr i żyroskop) i LIS3MDL (magnetometr). Komunikacja przez interfejs I2C. Adafruit 4569
Moduł z czujnikiem przyspieszenia i prędkości obrotowej oparty na układzie MPU6050. Komunikuje się przez interfejs I2C lub UART
Brak towaru
Moduł z czujnikiem przyspieszenia i prędkości obrotowej oparty na układzie ICG-20660L. Komunikuje się przez interfejs I2C lub SPI. DFRobot SEN0443
Moduł z 9-osiowym czujnikiem IMU ICM-20948 (3-osiowym akcelerometrem, żyroskopem i magnetometrem oraz DMP) i czujnikiem ciśnienia BMP280. Komunikacja przez I2C. Waveshare 10 DOF IMU Sensor (D)
Brak towaru
Moduł z 6-osiowym czujnikiem IMU, który pozwala na pomiar przyspieszenia i prędkości obrotowej w zakresie do ±16g i ±2000dps. Wyposażony w złącze STEMMA QT, komunikuje się przez I2C lub SPI. Adafruit 4503
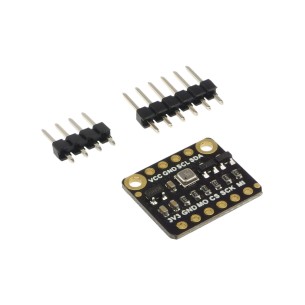
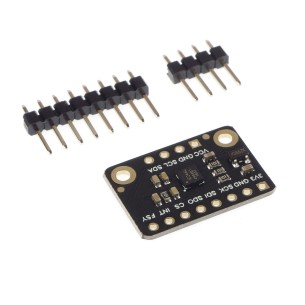
Moduł z 3-osiowym akcelerometrem i żyroskopem ISM330DHCX. Wyposażony w złącze Qwiic, komunikuje się przez interfejs I2C lub SPI. SparkFun SEN-19764
Moduł z 3-osiowym akcelerometrem i żyroskopem ISM330DHCX. Wyposażony w złącze Qwiic, komunikuje się przez interfejs I2C. SparkFun SEN-20176
Brak towaru
Moduł z czujnikiem przyspieszenia i prędkości obrotowej oparty na układzie LSM6DS3TR-C oraz magnetometrze LIS3MDL. Wyposażony w złącze STEMMA QT, komunikuje się przez interfejs I2C lub SPI. Adafruit 5543
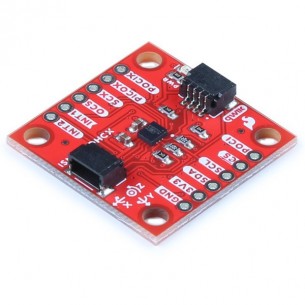
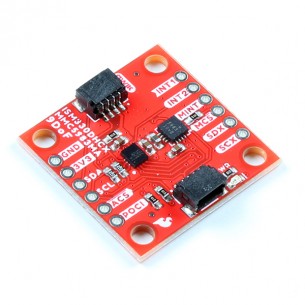
Moduł z 9-osiowym IMU. Łączy układ ISM330DHCX (akcelerometr i żyroskop) i MMC5983MA (magnetometr). Komunikacja przez interfejs I2C. SparkFun SEN-19895
Brak towaru
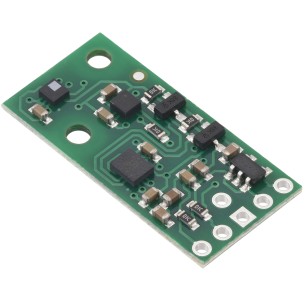
Niewielki moduł IMU 10 DoF z 3-osiowym żyroskopem i akcelerometrem (LSM6DSO), 3-osiowym magnetometrem (LIS3MDL) oraz barometrem (LPS22DF). Wyposażony jest w interfejs I2C, stabilizator napięcia oraz konwerter poziomów napięć. Pololu 2863
Niewielki moduł IMU 9 DoF z 3-osiowym żyroskopem i akcelerometrem (LSM6DSO) i 3-osiowym magnetometrem (LIS3MDL). Wyposażony jest w interfejs I2C, stabilizator napięcia oraz konwerter poziomów napięć. Pololu 2862
Moduł z 3-osiowym akcelerometrem i żyroskopem LSM6DSV16X. Jest energooszczędnym IMU zoptymalizowanym pod kątem urządzeń IoT z funkcjami przetwarzania danych z wykorzystaniem uczenia maszynowego. Wyposażony w złącze Qwiic, komunikuje się przez interfejs I2C. SparkFun SEN-21325
Brak towaru
Moduł z czujnikiem przyspieszenia i prędkości obrotowej oparty na układzie ICG-20660L. Komunikuje się przez interfejs I2C lub SPI. DFRobot SEN0443