


50,36 zł Netto
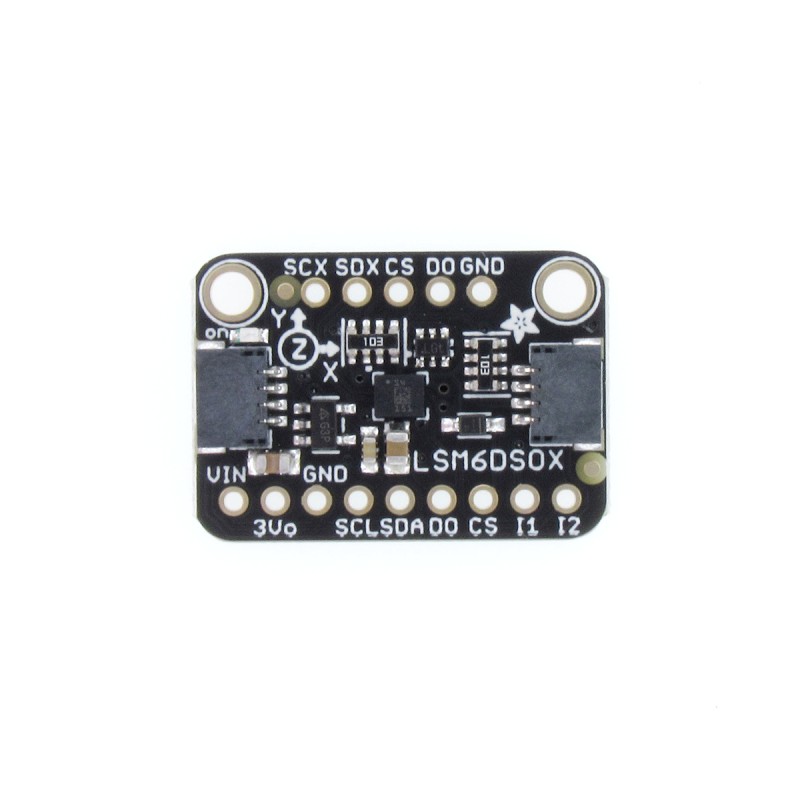
Moduł z czujnikiem przyspieszenia i prędkości obrotowej oparty na układzie LSM6DSOX. Wyposażony w złącze STEMMA QT, komunikuje się przez interfejs I2C, SPI lub I3C. Adafruit 4438
Moduł 6 DoF z 3-osiowym akcelerometrem i 3-osiowym żyroskopem oparty na układzie LSM6DSOX. Pozwala na pomiar przyspieszenia względem Ziemii oraz prędkości obrotowej, co umożliwia określenie orientacji w przestrzeni. Ma wbudowane wykrywanie uderzeń, aktywności, krokomierz oraz programowalną maszynę stanów i moduł uczenia maszynowego, który może wykonywać podstawowe rozpoznawanie gestów. Sprawdzi się m.in. w projektach robotów mobilnych czy obiektów latających (UAV). Moduł jest kompatybilny z kontrolerami 3,3 V oraz 5 V, a komunikacja odbywa się przez interfejs I2C (złącze STEMMA QT) lub SPI. Układ wspiera także interfejs MIPI I3C. Pełna dokumentacja dostępna jest na stronie produktu.
Cechy
Producent BTC Korporacja sp. z o. o. Lwowska 5 05-120 Legionowo Polska sprzedaz@kamami.pl 22 767 36 20
Osoba odpowiedzialna BTC Korporacja sp. z o. o. Lwowska 5 05-120 Legionowo Polska sprzedaz@kamami.pl 22 767 36 20
Zestaw 40 szt. przewodów połączeniowych żeńsko-żeńskich, w różnych kolorach o długości 10 cm
Zestaw 40 szt. przewodów połączeniowych męsko-żeńskich, w różnych kolorach o długości 10 cm
Elastyczny 4-żyłowy przewód o długości 100 mm zakończony z obu stron wtyczką Qwiic. Sparkfun PRT-17259
Moduł z 9-osiowym czujnikiem IMU ICM-20948. Układ to zintegrowany 3-osiowy akcelerometr, żyroskop i magnetometr oraz cyfrowy procesor ruchu DMP (Digital Motion Processor). Komunikacja przez I2C lub SPI. SparkFun SEN-15335
Moduł z 6-osiowym czujnikiem ruchu BMI160 (akcelerometr i żyroskop) z 16-bitową rozdzielczością danych. Zasilany napięciem z zakresu od 3,2 do 6 V. Komunikacja I2C. DFRobot SEN0250
Moduł z 6-osiowym czujnikiem IMU MPU6886, który łączy 3-osiowy akcelerometr i 3-osiowy żyroskop. M5Stack U095
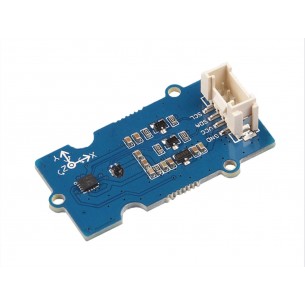
Moduł z układem ADIS16470, który łączy w sobie 3-osiowy akcelerometr i żyroskop. Płytka została wyposażona w złącze Grove i komunikuje się przez interfejs I2C lub SPI. Seeed Studio 101020672
Brak towaru
Moduł z 6-osiowym czujnikiem BMI088, który łączy w sobie akcelerometr i żyroskop. Płytka została wyposażona w złącze Grove i komunikuje się przez I2C. Seeed Studio 101020584
Brak towaru
Moduł z 9-osiowym czujnikiem IMU, który łączy w sobie akcelerometr i żyroskop (układ ICM20600) oraz magnetometr (układ AK09918). Płytka została wyposażona w złącze Grove i komunikuje się przez interfejs I2C. Seeed Studio 101020585
Moduł z czujnikiem LSM6DS3, który łączy w sobie 3-osiowy akcelerometr i 3-osiowy żyroskop. Płytka została wyposażona w złącze Grove i komunikuje się przez interfejs I2C. Seeed Studio 105020012
Kompaktowy sensor IMU 9DOF z akcelerometrem, żyroskopem i magnetometrem, obsługujący zaawansowaną fuzję danych dzięki rdzeniowi Arm Cortex M0 i oprogramowaniu CEVA SH-2, oferujący interfejsy I²C, SPI i UART-RVC oraz szeroki zakres funkcji do precyzyjnej analizy ruchu i orientacji. Adafruit 4754
Moduł 10 DoF z akcelerometrem ADXL345, magnetometrem HMC5883L, żyroskopem ITG-3205 i barometrem BMP280. Komunikacja przez interfejs I2C. DFRobot SEN0140
Brak towaru
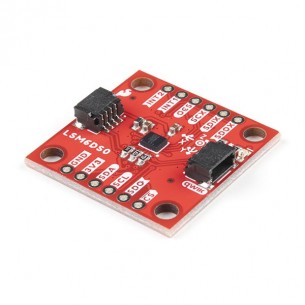
Moduł z 6-osiowym czujnikiem IMU LSM6DSO, który łączy 3-osiowy akcelerometr i żyroskop oraz bufor FIFO o pojemności 9 kB i funkcje obsługi zdarzeń. Komunikuje się przez I2C lub SPI. SparkFun SEN-18020
Moduł z 9-osiowym czujnikiem IMU ICM-20948, zintegrowanym 3-osiowym akcelerometrem, żyroskopem i magnetometrem oraz cyfrowym procesorem ruchu DMP (Digital Motion Processor). Komunikacja przez I2C. Pimoroni PIM448
Brak towaru
Moduł z 9-osiowym czujnikiem IMU BNO055. Ma wbudowany układ przetwarzający, który zwraca dane jako orientację w przestrzeni 3D. Komunikuje się przez I2C. Adafruit 4646
Brak towaru
Moduł z 3-osiowym akcelerometrem i żyroskopem ISM330DHCX. Wyposażony w złącze STEMMA QT, komunikuje się przez interfejs I2C lub SPI. Adafruit 4502
Moduł z 9-osiowym czujnikiem IMU ICM-20948. Układ to zintegrowany 3-osiowy akcelerometr, żyroskop i magnetometr oraz cyfrowy procesor ruchu DMP (Digital Motion Processor). Komunikacja przez I2C lub SPI. Adafruit 4554
Moduł z czujnikiem przyspieszenia i prędkości obrotowej oparty na układzie LSM6DSOX. Wyposażony w złącze STEMMA QT, komunikuje się przez interfejs I2C, SPI lub I3C. Adafruit 4438
Moduł z czujnikiem przyspieszenia i prędkości obrotowej oparty na układzie MPU-6050. Wyposażony w złącze STEMMA QT, komunikuje się przez interfejs I2C. Adafruit 3886
Moduł z czujnikiem przyspieszenia i prędkości obrotowej oparty na układzie LSM6DSOX. Wyposażony w złącze STEMMA QT, komunikuje się przez interfejs I2C, SPI lub I3C. Adafruit 4438