





zł172.83 tax excl.
MEMS accelerometer, magnetometer and gyroscope on a single die with a high speed ARM Cortex-M0 based processor
Adafruit-2472
DESCRIPTION
If you've ever ordered and wire up a 9-DOF sensor, chances are you've also realized the challenge of turning the sensor data from an accelerometer, gyroscope and magnetometer into actual "3D space orientation"! Orientation is a hard problem to solve. The sensor fusion algorithms (the secret sauce that blends accelerometer, magnetometer and gyroscope data into stable three-axis orientation output) can be mind-numbingly difficult to get right and implement on low cost real time systems.

Bosch is the first company to get this right by taking a MEMS accelerometer, magnetometer and gyroscope and putting them on a single die with a high speed ARM Cortex-M0 based processor to digest all the sensor data, abstract the sensor fusion and real time requirements away, and spit out data you can use in quaternions, Euler angles or vectors.
Rather than spending weeks or months fiddling with algorithms of varying accuracy and complexity, you can have meaningful sensor data in minutes thanks to the BNO055 - a smart 9-DOF sensor that does the sensor fusion all on its own! You can read the data right over I2C and Bob's yer uncle.
The BNO055 can output the following sensor data:
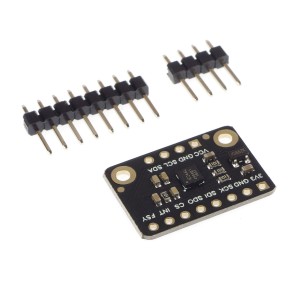
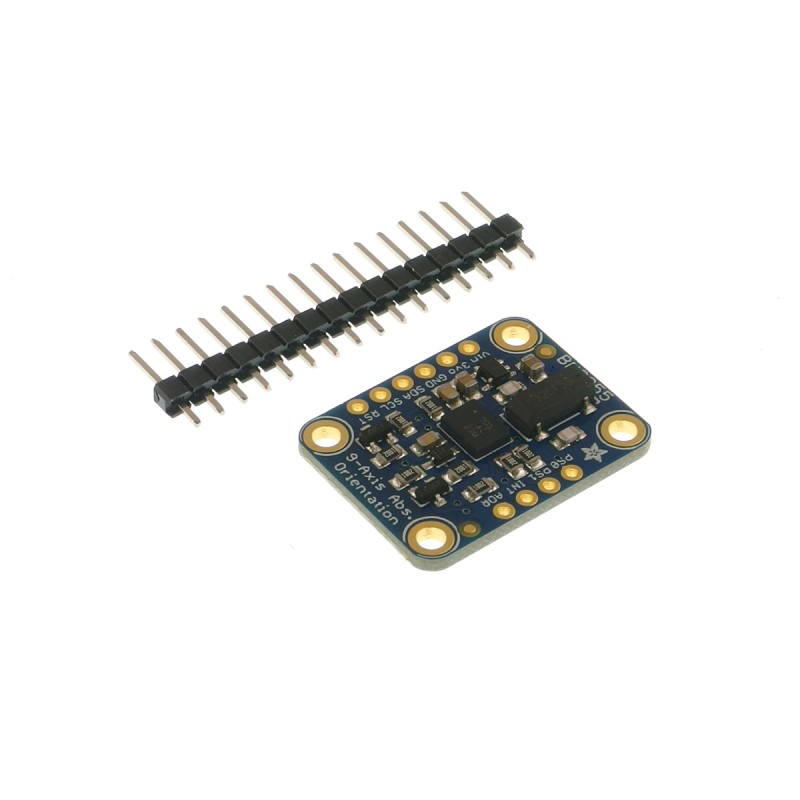
Handy, right? So we placed this very nice sensor on its own breakout, complete with 3.3V regulator, logic level shifting for the Reset and I2C pins, an external 32.768KHz crystal (recommended for best performance), and breakouts for some other pins you might find handy. Comes assembled and tested, with a small piece of header. Some soldering is required to attach the header to the breakout PCB, but its pretty easy work. Best of all you can get started in 10 minutes with our handy tutorial on assembly, wiring, Arduino library and Processing graphical interface, and more!
TECHNICAL DETAILS
LINKS
Data sheet
Manufacturer BTC Korporacja sp. z o. o. Lwowska 5 05-120 Legionowo Poland sprzedaz@kamami.pl 22 767 36 20
Responsible person BTC Korporacja sp. z o. o. Lwowska 5 05-120 Legionowo Poland sprzedaz@kamami.pl 22 767 36 20
Module with acceleration and rotational speed sensor based on the MPU6050 system. It communicates via the I2C or UART interface
No product available!
A module with an acceleration and rotational speed sensor based on the ICG-20660L system. It communicates via the I2C or SPI interface. DFRobot SEN0443
Module with 9-axis IMU ICM-20948 sensor (3-axis accelerometer, gyroscope and magnetometer and DMP) and BMP280 pressure sensor. Communication via I2C. Waveshare 10 DOF IMU Sensor (D)
No product available!
Module with 6-axis IMU sensor that allows you to measure acceleration and rotational speed in the range up to ±16g and ±2000dps. Equipped with a STEMMA QT connector, it communicates via I2C or SPI. Adafruit 4503
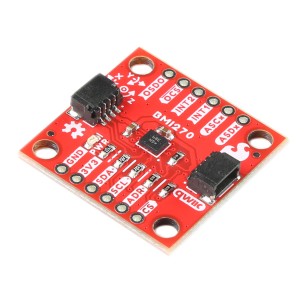
Module with 3-axis accelerometer and ISM330DHCX gyroscope. Equipped with a Qwiic connector, it communicates via the I2C or SPI interface. SparkFun SEN-19764
Module with 3-axis accelerometer and ISM330DHCX gyroscope. Equipped with a Qwiic connector, it communicates via the I2C interface. SparkFun SEN-20176
No product available!
A module with an acceleration and rotational speed sensor based on the LSM6DS3TR-C system and the LIS3MDL magnetometer. Equipped with a STEMMA QT connector, it communicates via the I2C or SPI interface. Adafruit 5543
Module with 9-axis IMU. It combines the ISM330DHCX (accelerometer and gyroscope) and MMC5983MA (magnetometer) systems. Communication via the I2C interface. SparkFun SEN-19895
No product available!
Small 10 DoF IMU module with 3-axis gyroscope and accelerometer (LSM6DSO), 3-axis magnetometer (LIS3MDL) and barometer (LPS22DF). It is equipped with an I2C interface, a voltage stabilizer and a voltage level converter. Pololu 2863
Small 9 DoF IMU module with 3-axis gyroscope and accelerometer (LSM6DSO) and 3-axis magnetometer (LIS3MDL). It is equipped with an I2C interface, a voltage stabilizer and a logic level converter. Pololu 2862
Module with 3-axis accelerometer and gyroscope LSM6DSV16X. The chip is a low-power IMU optimized for IoT devices with data processing capabilities using machine learning. Equipped with a Qwiic connector, it communicates via the I2C interface. SparkFun SEN-21325
No product available!
Module with 3-axis accelerometer and gyroscope LSM6DSV16X. The chip is a low-power IMU optimized for IoT devices with data processing capabilities using machine learning. Equipped with a Qwiic connector, it communicates via the I2C interface. SparkFun SEN-21336
No product available!
BMI270 3-axis accelerometer and gyroscope module. The chip is a low-power IMU optimised for wearables, providing precise acceleration measurement, angular velocity measurement and motion-triggered interrupt functions. Equipped with a Qwiic connector, it communicates via an I2C interface. SparkFun SEN-22397
BMI270 3-axis accelerometer and gyroscope module. The chip is a low-power IMU optimised for wearables, providing precise acceleration measurement, angular velocity measurement and motion-triggered interrupt functions. Equipped with a Qwiic connector, it communicates via an I2C interface. SparkFun SEN-22398
No product available!
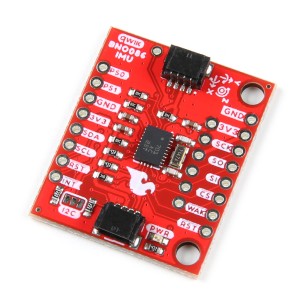
Module with a sensor for use in the field of virtual reality (VR). It is based on the BNO086 system, which integrates an accelerometer, gyroscope, magnetometer and a microcontroller with an ARM Cortex M0+ core. SparkFun SEN-22857
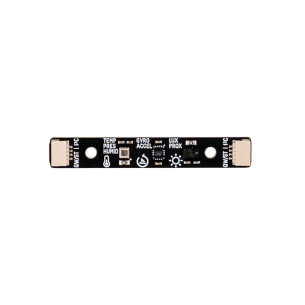
Compact module with three I2C sensors, enabling measurement of temperature, humidity, pressure, light, proximity and motion. It offers two Qw/ST connectors, so you can quickly connect it to Raspberry Pi, Pico or other microcontrollers. Ideal for IoT applications, home automation and environmental analysis in mobile or stationary projects. Pimoroni PIM745
No product available!
MEMS accelerometer, magnetometer and gyroscope on a single die with a high speed ARM Cortex-M0 based processor