")


")
 - widok od góry")
 - widok od spodu")

24,06 zł Netto
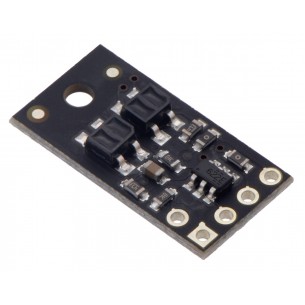
Niewielki moduł z czujnikiem odbiciowym QRE1113GR. Czujnik zbudowany jest z diody LED IR oraz fototranzystora IR. Z jego pomocą możliwe jest określenie jasności położenia, nad którym się znajduje, może być wykorzystywany np. do wykrywania czarnej linii w robotach typu Linefollower. SparkFun ROB-09454
Niewielki moduł z czujnikiem odbiciowym QRE1113GR. Czujnik zbudowany jest z diody LED IR oraz fototranzystora IR. Z jego pomocą możliwe jest określenie jasności położenia, nad którym się znajduje, może być wykorzystywany np. do wykrywania czarnej linii w robotach typu Linefollower. Optymalny dystans między czujnikiem a podłożem to około 3 mm. Sygnałem wyjściowym jest sygnał cyfrowy.
W sprzedaży dostępna jest również wersja z wyjściem analogowym- Sparkfun Moduł z czujnikiem odbiciowym QRE1113 (analogowy)
Cechy
Producent BTC Korporacja sp. z o. o. Lwowska 5 05-120 Legionowo Polska sprzedaz@kamami.pl 22 767 36 20
Osoba odpowiedzialna BTC Korporacja sp. z o. o. Lwowska 5 05-120 Legionowo Polska sprzedaz@kamami.pl 22 767 36 20
Liniowy sensor odbiciowy Pololu QTR-8A z ośmioma kanałami optycznymi, niezależnymi wyjściami każdego kanału i możliwością rozdzielnia na dwie niezależne części: 2- i 6-kanałową.
Brak towaru
Niewielki moduł z czujnikiem odbiciowym QRE1113GR. Czujnik zbudowany jest z diody LED IR oraz fototranzystora IR. Z jego pomocą możliwe jest określenie jasności położenia, nad którym się znajduje, może być wykorzystywany np. do wykrywania czarnej linii w robotach typu Linefollower. SparkFun ROB-09453
Brak towaru
Czujnik odbiciowy pozwala na "śledzenie linii", co jest podstawą działania robotów takich, jak na przykład Line Follower; może także posłużyć do wykrywania krawędzi. DFRobot SEN0017
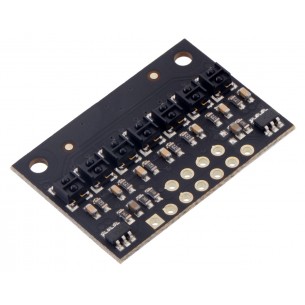
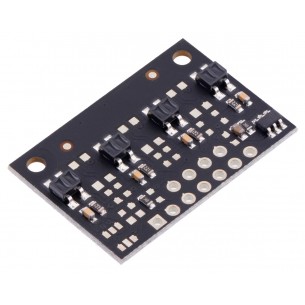
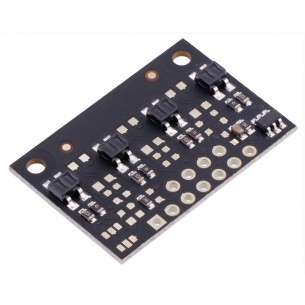
Moduł z 7 transoptorem typu QTRX z wyjściem RC (cyfrowym). Moduł zasilany napięciem 2,9 - 5,5V, wykrywa obiekty w odległości do 40 mm. Czujnik znajdzie zastosowanie w projektach wymagających wykrywania zmian w podłożu, np. w robotach typu linefollower. Pololu 4307
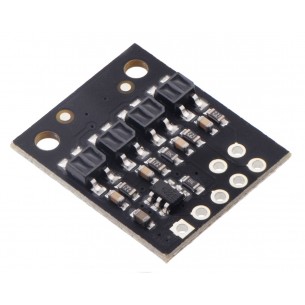
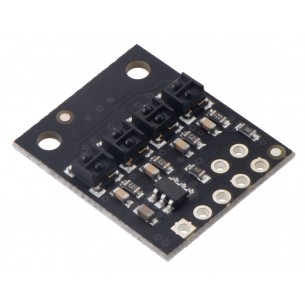
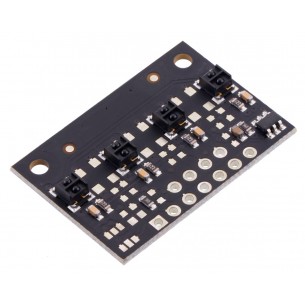
Moduł z 4 transoptorami typu QTR z wyjściem RC (cyfrowym). Moduł zasilany napięciem 2,9 - 5,5V, wykrywa obiekty w odległości do 40 mm. Czujnik znajdzie zastosowanie w projektach wymagających wykrywania zmian w podłożu, np. w robotach typu linefollower. Pololu 4104
Brak towaru
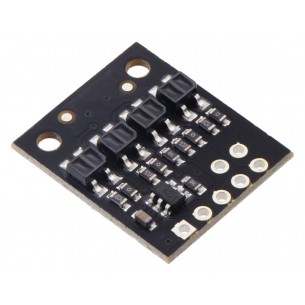
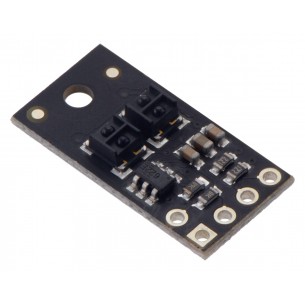
Moduł z 2 transoptorami typu QTR z wyjściem RC (cyfrowym). Moduł zasilany napięciem 2,9 - 5,5V, wykrywa obiekty w odległości do 30 mm. Czujnik znajdzie zastosowanie w projektach wymagających wykrywania zmian w podłożu, np. w robotach typu linefollower. Pololu 4102
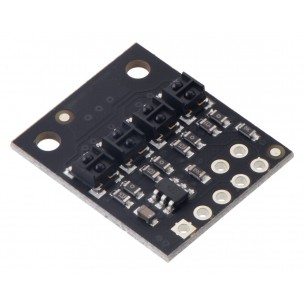
Moduł z 4 transoptorami typu QTR z wyjściem analogowym. Moduł zasilany napięciem 2,9 - 5,5V, wykrywa obiekty w odległości do 40 mm. Czujnik znajdzie zastosowanie w projektach wymagających wykrywania zmian w podłożu, np. w robotach typu linefollower. Pololu 4204
Moduł z 2 transoptorami typu QTR z wyjściem analogowym. Moduł zasilany napięciem 2,9 - 5,5V, wykrywa obiekty w odległości do 30 mm. Czujnik znajdzie zastosowanie w projektach wymagających wykrywania zmian w podłożu, np. w robotach typu linefollower. Pololu 4202
Moduł z 4 transoptorem typu QTRX z wyjściem RC (cyfrowym). Moduł zasilany napięciem 2,9 - 5,5V, wykrywa obiekty w odległości do 40 mm. Czujnik znajdzie zastosowanie w projektach wymagających wykrywania zmian w podłożu, np. w robotach typu linefollower. Pololu 4304
Moduł z 2 transoptorem typu QTRX z wyjściem RC (cyfrowym). Moduł zasilany napięciem 2,9 - 5,5V, wykrywa obiekty w odległości do 30 mm. Czujnik znajdzie zastosowanie w projektach wymagających wykrywania zmian w podłożu, np. w robotach typu linefollower. Pololu 4302
Moduł z 4 transoptorem typu QTRX z wyjściem analogowym. Moduł zasilany napięciem 2,9 - 5,5V, wykrywa obiekty w odległości do 40 mm. Czujnik znajdzie zastosowanie w projektach wymagających wykrywania zmian w podłożu, np. w robotach typu linefollower. Pololu 4404
Moduł z 2 transoptorem typu QTRX z wyjściem analogowym. Moduł zasilany napięciem 2,9 - 5,5V, wykrywa obiekty w odległości do 30 mm. Czujnik znajdzie zastosowanie w projektach wymagających wykrywania zmian w podłożu, np. w robotach typu linefollower. Pololu 4402
Moduł z 4 transoptorami typu QTR z wyjściem RC (cyfrowym). Moduł zasilany napięciem 2,9 - 5,5V, wykrywa obiekty w odległości do 40 mm. Czujnik znajdzie zastosowanie w projektach wymagających wykrywania zmian w podłożu, np. w robotach typu linefollower. Pololu 4144
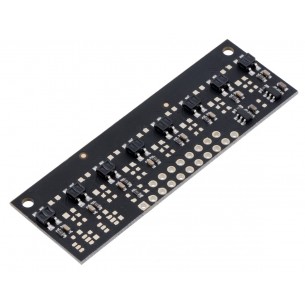
Moduł z 15 transoptorami typu QTR z wyjściem RC (cyfrowym). Moduł zasilany napięciem 2,9 - 5,5V, wykrywa obiekty w odległości do 50 mm. Czujnik znajdzie zastosowanie w projektach wymagających wykrywania zmian w podłożu, np. w robotach typu linefollower. Pololu 4115
Moduł z 15 transoptorami typu QTR z wyjściem analogowym. Moduł zasilany napięciem 2,9 - 5,5V, wykrywa obiekty w odległości do 50 mm. Czujnik znajdzie zastosowanie w projektach wymagających wykrywania zmian w podłożu, np. w robotach typu linefollower. Pololu 4215
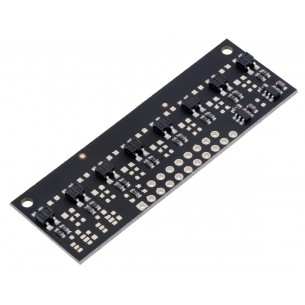
Moduł z 8 transoptorami typu QTR z wyjściem RC (cyfrowym). Moduł zasilany napięciem 2,9 - 5,5V, wykrywa obiekty w odległości do 40 mm. Czujnik znajdzie zastosowanie w projektach wymagających wykrywania zmian w podłożu, np. w robotach typu linefollower. Pololu 4148
Moduł z 8 transoptorami typu QTR z wyjściem analogowym. Moduł zasilany napięciem 2,9 - 5,5V, wykrywa obiekty w odległości do 40 mm. Czujnik znajdzie zastosowanie w projektach wymagających wykrywania zmian w podłożu, np. w robotach typu linefollower. Pololu 4248
Brak towaru
Moduł z 4 transoptorami typu QTR z wyjściem analogowym. Moduł zasilany napięciem 2,9 - 5,5V, wykrywa obiekty w odległości do 40 mm. Czujnik znajdzie zastosowanie w projektach wymagających wykrywania zmian w podłożu, np. w robotach typu linefollower. Pololu 4244
Moduł z 4 transoptorem typu QTRX z wyjściem RC (cyfrowym). Moduł zasilany napięciem 2,9 - 5,5V, wykrywa obiekty w odległości do 40 mm. Czujnik znajdzie zastosowanie w projektach wymagających wykrywania zmian w podłożu, np. w robotach typu linefollower. Pololu 4344
Niewielki moduł z czujnikiem odbiciowym QRE1113GR. Czujnik zbudowany jest z diody LED IR oraz fototranzystora IR. Z jego pomocą możliwe jest określenie jasności położenia, nad którym się znajduje, może być wykorzystywany np. do wykrywania czarnej linii w robotach typu Linefollower. SparkFun ROB-09454