")


")
 - widok od góry")
 - widok od spodu")

19,62 zł Netto
Niewielki moduł z czujnikiem odbiciowym QRE1113GR. Czujnik zbudowany jest z diody LED IR oraz fototranzystora IR. Z jego pomocą możliwe jest określenie jasności położenia, nad którym się znajduje, może być wykorzystywany np. do wykrywania czarnej linii w robotach typu Linefollower. SparkFun ROB-09453
Niewielki moduł z czujnikiem odbiciowym QRE1113GR. Czujnik zbudowany jest z diody LED IR oraz fototranzystora IR. Z jego pomocą możliwe jest określenie jasności położenia, nad którym się znajduje, może być wykorzystywany np. do wykrywania czarnej linii w robotach typu Linefollower. Optymalny dystans między czujnikiem a podłożem to około 3 mm. Sygnałem wyjściowym jest sygnał analogowy.
W sprzedaży dostępna jest również wersja z wyjściem cyfrowym - Sparkfun Moduł z czujnikiem odbiciowym QRE1113 (cyfrowy)
Cechy
Producent BTC Korporacja sp. z o. o. Lwowska 5 05-120 Legionowo Polska sprzedaz@kamami.pl 22 767 36 20
Osoba odpowiedzialna BTC Korporacja sp. z o. o. Lwowska 5 05-120 Legionowo Polska sprzedaz@kamami.pl 22 767 36 20
Liniowy sensor odbiciowy Pololu QTR-8A z ośmioma kanałami optycznymi, niezależnymi wyjściami każdego kanału i możliwością rozdzielnia na dwie niezależne części: 2- i 6-kanałową.
Brak towaru
Niewielki moduł z czujnikiem odbiciowym QRE1113GR. Czujnik zbudowany jest z diody LED IR oraz fototranzystora IR. Z jego pomocą możliwe jest określenie jasności położenia, nad którym się znajduje, może być wykorzystywany np. do wykrywania czarnej linii w robotach typu Linefollower. SparkFun ROB-09454
Brak towaru
Czujnik odbiciowy pozwala na "śledzenie linii", co jest podstawą działania robotów takich, jak na przykład Line Follower; może także posłużyć do wykrywania krawędzi. DFRobot SEN0017
Czujnik odbiciowy IR (podczerwień) firmy Waveshare pozwala na śledzenie linii, co jest podstawą działania robotów line follower, może także posłużyć do wykrywania krawędzi. Czujnik ma wyjście analogowe i cyfrowe, czułość czujnika jest regulowana. Waveshare Infrared Reflective Sensor
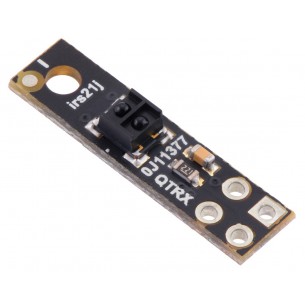
Moduł z 15 transoptorem typu QTRX z wyjściem analogowym. Moduł zasilany napięciem 2,9 - 5,5V, wykrywa obiekty w odległości do 50 mm. Czujnik znajdzie zastosowanie w projektach wymagających wykrywania zmian w podłożu, np. w robotach typu linefollower. Pololu 4415
Brak towaru
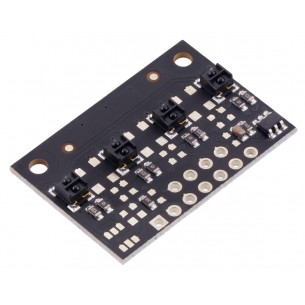
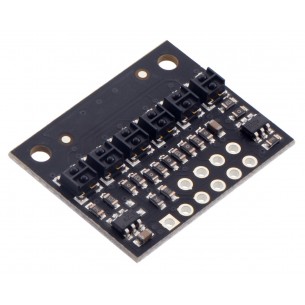
Moduł z 8 transoptorem typu QTRX z wyjściem RC (cyfrowym). Moduł zasilany napięciem 2,9 - 5,5V, wykrywa obiekty w odległości do 40 mm. Czujnik znajdzie zastosowanie w projektach wymagających wykrywania zmian w podłożu, np. w robotach typu linefollower. Pololu 4348
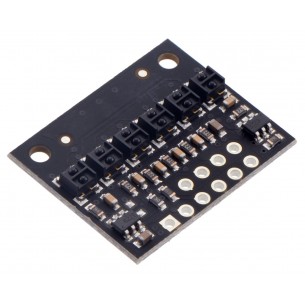
Moduł z 4 transoptorem typu QTRX z wyjściem analogowym. Moduł zasilany napięciem 2,9 - 5,5V, wykrywa obiekty w odległości do 40 mm. Czujnik znajdzie zastosowanie w projektach wymagających wykrywania zmian w podłożu, np. w robotach typu linefollower. Pololu 4444
Moduł z 1 transoptorem typu QTR z wyjściem analogowym. Moduł zasilany napięciem 2,9 - 5,5V, wykrywa obiekty w odległości do 30 mm. Czujnik znajdzie zastosowanie w projektach wymagających wykrywania zmian w podłożu, np. w robotach typu linefollower. Pololu 4201
Moduł z 1 transoptorem typu QTR z wyjściem RC (cyfrowym). Moduł zasilany napięciem 2,9 - 5,5V, wykrywa obiekty w odległości do 30 mm. Czujnik znajdzie zastosowanie w projektach wymagających wykrywania zmian w podłożu, np. w robotach typu linefollower. Pololu 4101
Brak towaru
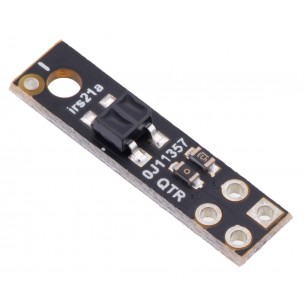
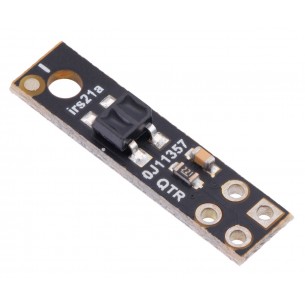
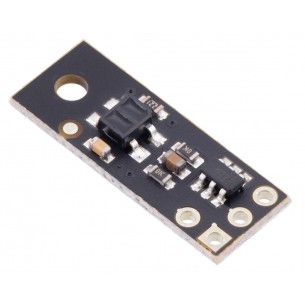
Moduł czujnika odbiciowego z 1 transoptorem typu QTRXL-HD z wyjściem analogowym. Moduł zasilany napięciem 2,9...5,5V, wykrywa obiekty w odległości do 80mm. Pololu 4601
Brak towaru
Moduł czujnika odbiciowego z 1 transoptorem typu QTRXL-HD z wyjściem analogowym. Moduł zasilany napięciem 2,9...5,5V, wykrywa obiekty w odległości do 80mm. Pololu 4641
Moduł z 1 transoptorem typu QTRXL z wyjściem RC (cyfrowym). Jest zasilany napięciem od 2,9 do 5,5 V, wykrywa obiekty w odległości do 80 mm. Pololu 4501
Moduł z 1 transoptorem typu QTRXL z wyjściem RC (cyfrowym). Jest zasilany napięciem od 2,9 do 5,5 V, wykrywa obiekty w odległości do 80 mm. Pololu 4541
Brak towaru
Moduł z 1 transoptorem typu QTRX z wyjściem analogowym. Moduł zasilany napięciem 2,9 - 5,5V, wykrywa obiekty w odległości do 30 mm. Czujnik znajdzie zastosowanie w projektach wymagających wykrywania zmian w podłożu, np. w robotach typu linefollower. Pololu 4401
Moduł z 1 transoptorem typu QTRX z wyjściem analogowym. Moduł zasilany napięciem 2,9 - 5,5V, wykrywa obiekty w odległości do 30 mm. Czujnik znajdzie zastosowanie w projektach wymagających wykrywania zmian w podłożu, np. w robotach typu linefollower. Pololu 4441
Moduł z 6 transoptorem typu QTRX z wyjściem analogowym. Moduł zasilany napięciem 2,9 - 5,5V, wykrywa obiekty w odległości do 40 mm. Czujnik znajdzie zastosowanie w projektach wymagających wykrywania zmian w podłożu, np. w robotach typu linefollower. Pololu 4406
Moduł z 6 transoptorem typu QTRX z wyjściem RC (cyfrowym). Moduł zasilany napięciem 2,9 - 5,5V, wykrywa obiekty w odległości do 40 mm. Czujnik znajdzie zastosowanie w projektach wymagających wykrywania zmian w podłożu, np. w robotach typu linefollower. Pololu 4306
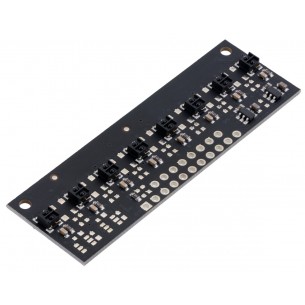
Moduł z 31 transoptorami typu QTR z wyjściem RC (cyfrowym). Moduł zasilany napięciem 2,9 - 5,5V, wykrywa obiekty w odległości do 50 mm. Czujnik znajdzie zastosowanie w projektach wymagających wykrywania zmian w podłożu, np. w robotach typu linefollower. Pololu 4131
Moduł z 1 transoptorem typu QTR z wyjściem RC (cyfrowym). Moduł zasilany napięciem 2,9 - 5,5V, wykrywa obiekty w odległości do 30 mm. Czujnik znajdzie zastosowanie w projektach wymagających wykrywania zmian w podłożu, np. w robotach typu linefollower. Pololu 4141
Moduł z 31 transoptorem typu QTRX z wyjściem analogowym. Moduł zasilany napięciem 2,9 - 5,5V, wykrywa obiekty w odległości do 50 mm. Czujnik znajdzie zastosowanie w projektach wymagających wykrywania zmian w podłożu, np. w robotach typu linefollower. Pololu 4431
Brak towaru
Niewielki moduł z czujnikiem odbiciowym QRE1113GR. Czujnik zbudowany jest z diody LED IR oraz fototranzystora IR. Z jego pomocą możliwe jest określenie jasności położenia, nad którym się znajduje, może być wykorzystywany np. do wykrywania czarnej linii w robotach typu Linefollower. SparkFun ROB-09453