")


")
")
")

55,61 zł Netto
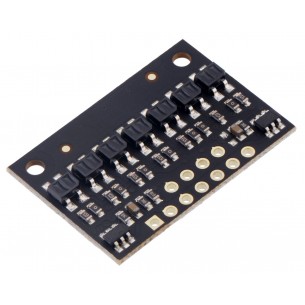
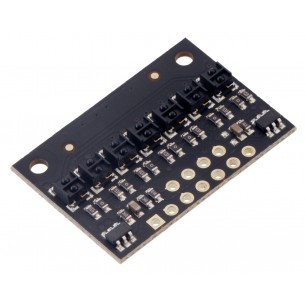
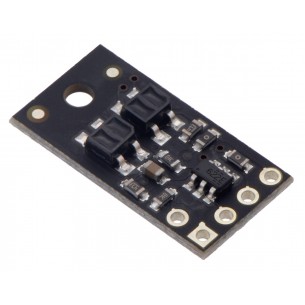
Moduł z 8 transoptorem typu QTRX z wyjściem RC (cyfrowym). Moduł zasilany napięciem 2,9 - 5,5V, wykrywa obiekty w odległości do 40 mm. Czujnik znajdzie zastosowanie w projektach wymagających wykrywania zmian w podłożu, np. w robotach typu linefollower. Pololu 4348
Czujnik obiciowy składający się z szeregu 8 transoptorów typu QTRX z możliwością sterowania indywidualnie jasnością każdego z podczerwonych LED-ów. Sensory na płytce są średnio zagęszczone (MD), a odległość między nimi wynosi 8mm. Moduł może być zasilany napięciem z zakresu od 2,9 V do 5,5 V i niezależnie od napięcia zasilania pobiera prąd do 17 mA. Optymalna odległość czujnika od podłoża to 10 mm, a maksymalna odległość wynosi 40 mm. Moduł idealnie nadaje się do wykrywania zmian w odbiciu światła, dzięki czemu może być stosowany do wykrywania krawędzi podłoża lub do śledzenia linii w robotach typu linefollower.
Cechy
Producent BTC Korporacja sp. z o. o. Lwowska 5 05-120 Legionowo Polska sprzedaz@kamami.pl 22 767 36 20
Osoba odpowiedzialna BTC Korporacja sp. z o. o. Lwowska 5 05-120 Legionowo Polska sprzedaz@kamami.pl 22 767 36 20
Arduino Uno Rev3 to popularna płytka z mikrokontrolerem Atmel ATmega328 z rodziny AVR, do dyspozycji użytkownika jest 14 linii I/O, 6 kanałów PWM, 6 wejść analogowych. Dodatkowy mikrokontroler ATmega16U4 realizuje komunikację przez interfejs USB. Arduino A000066
Podwozie Romi Chassis Kit to idealna baza do budowy niewielkiego robota mobilnego. W zestawie znajdziemy wszystkie niezbędne elementy mechaniczne do budowy kołowego robota mobilnego. Zestaw do samodzielnego montażu. Pololu 3504
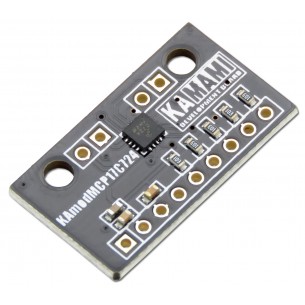
KAmodMPC17C724 to moduł z podwójnym mostkiem H typu MPC17C724. Układ pozwala na sterowanie dwoma silnikami szczotkowymi DC lub jednym bipolarnym silnikiem krokowym. Sterownik pracuje przy napięciu z zakresu 2,7 - 5,5 V i może współpracować z silnikami o poborze prądu do 0,4 A.
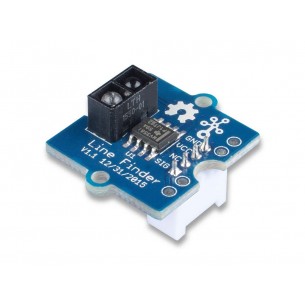
Czujnik odbiciowy IR (podczerwień) firmy Waveshare pozwala na śledzenie linii, co jest podstawą działania robotów line follower, może także posłużyć do wykrywania krawędzi. Czujnik ma wyjście analogowe i cyfrowe, czułość czujnika jest regulowana. Waveshare Infrared Reflective Sensor
Moduł z czujnikiem odbiciowym (czujnikiem linii) RS-06WD. Płytka została wyposażona w złącze Grove i komunikuje się przez interfejs cyfrowy. Seeed Studio 101020172
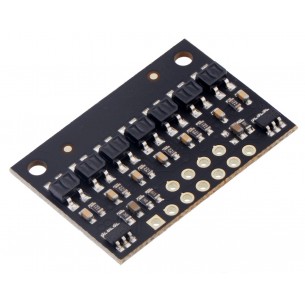
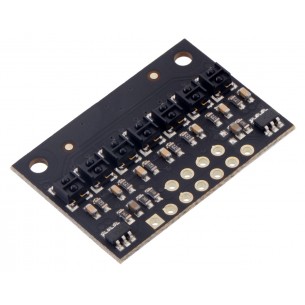
Moduł z 7 transoptorami typu QTR z wyjściem analogowym. Moduł zasilany napięciem 2,9 - 5,5V, wykrywa obiekty w odległości do 40 mm. Czujnik znajdzie zastosowanie w projektach wymagających wykrywania zmian w podłożu, np. w robotach typu linefollower. Pololu 4207
Moduł z 7 transoptorami typu QTR z wyjściem RC (cyfrowym). Moduł zasilany napięciem 2,9 - 5,5V, wykrywa obiekty w odległości do 40 mm. Czujnik znajdzie zastosowanie w projektach wymagających wykrywania zmian w podłożu, np. w robotach typu linefollower. Pololu 4107
Moduł z 7 transoptorem typu QTRX z wyjściem analogowym. Moduł zasilany napięciem 2,9 - 5,5V, wykrywa obiekty w odległości do 40 mm. Czujnik znajdzie zastosowanie w projektach wymagających wykrywania zmian w podłożu, np. w robotach typu linefollower. Pololu 4407
Moduł z 7 transoptorem typu QTRX z wyjściem RC (cyfrowym). Moduł zasilany napięciem 2,9 - 5,5V, wykrywa obiekty w odległości do 40 mm. Czujnik znajdzie zastosowanie w projektach wymagających wykrywania zmian w podłożu, np. w robotach typu linefollower. Pololu 4307
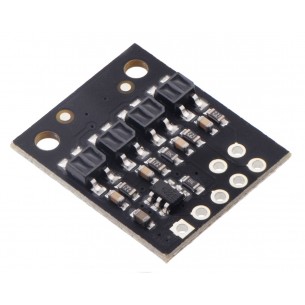
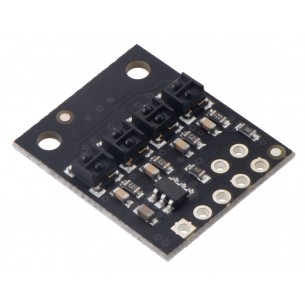
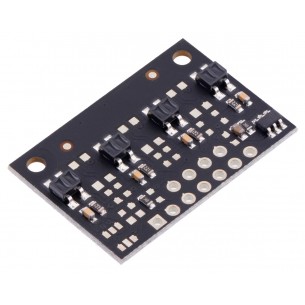
Moduł z 4 transoptorami typu QTR z wyjściem RC (cyfrowym). Moduł zasilany napięciem 2,9 - 5,5V, wykrywa obiekty w odległości do 40 mm. Czujnik znajdzie zastosowanie w projektach wymagających wykrywania zmian w podłożu, np. w robotach typu linefollower. Pololu 4104
Brak towaru
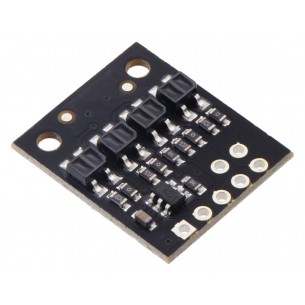
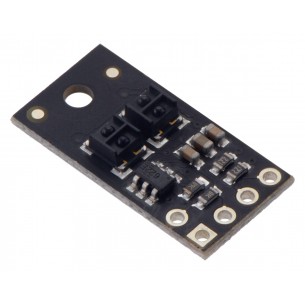
Moduł z 2 transoptorami typu QTR z wyjściem RC (cyfrowym). Moduł zasilany napięciem 2,9 - 5,5V, wykrywa obiekty w odległości do 30 mm. Czujnik znajdzie zastosowanie w projektach wymagających wykrywania zmian w podłożu, np. w robotach typu linefollower. Pololu 4102
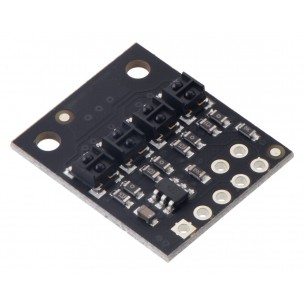
Moduł z 4 transoptorami typu QTR z wyjściem analogowym. Moduł zasilany napięciem 2,9 - 5,5V, wykrywa obiekty w odległości do 40 mm. Czujnik znajdzie zastosowanie w projektach wymagających wykrywania zmian w podłożu, np. w robotach typu linefollower. Pololu 4204
Moduł z 2 transoptorami typu QTR z wyjściem analogowym. Moduł zasilany napięciem 2,9 - 5,5V, wykrywa obiekty w odległości do 30 mm. Czujnik znajdzie zastosowanie w projektach wymagających wykrywania zmian w podłożu, np. w robotach typu linefollower. Pololu 4202
Moduł z 4 transoptorem typu QTRX z wyjściem RC (cyfrowym). Moduł zasilany napięciem 2,9 - 5,5V, wykrywa obiekty w odległości do 40 mm. Czujnik znajdzie zastosowanie w projektach wymagających wykrywania zmian w podłożu, np. w robotach typu linefollower. Pololu 4304
Moduł z 2 transoptorem typu QTRX z wyjściem RC (cyfrowym). Moduł zasilany napięciem 2,9 - 5,5V, wykrywa obiekty w odległości do 30 mm. Czujnik znajdzie zastosowanie w projektach wymagających wykrywania zmian w podłożu, np. w robotach typu linefollower. Pololu 4302
Moduł z 4 transoptorem typu QTRX z wyjściem analogowym. Moduł zasilany napięciem 2,9 - 5,5V, wykrywa obiekty w odległości do 40 mm. Czujnik znajdzie zastosowanie w projektach wymagających wykrywania zmian w podłożu, np. w robotach typu linefollower. Pololu 4404
Moduł z 2 transoptorem typu QTRX z wyjściem analogowym. Moduł zasilany napięciem 2,9 - 5,5V, wykrywa obiekty w odległości do 30 mm. Czujnik znajdzie zastosowanie w projektach wymagających wykrywania zmian w podłożu, np. w robotach typu linefollower. Pololu 4402
Moduł z 4 transoptorami typu QTR z wyjściem RC (cyfrowym). Moduł zasilany napięciem 2,9 - 5,5V, wykrywa obiekty w odległości do 40 mm. Czujnik znajdzie zastosowanie w projektach wymagających wykrywania zmian w podłożu, np. w robotach typu linefollower. Pololu 4144
Moduł z 15 transoptorami typu QTR z wyjściem RC (cyfrowym). Moduł zasilany napięciem 2,9 - 5,5V, wykrywa obiekty w odległości do 50 mm. Czujnik znajdzie zastosowanie w projektach wymagających wykrywania zmian w podłożu, np. w robotach typu linefollower. Pololu 4115
Moduł z 8 transoptorem typu QTRX z wyjściem RC (cyfrowym). Moduł zasilany napięciem 2,9 - 5,5V, wykrywa obiekty w odległości do 40 mm. Czujnik znajdzie zastosowanie w projektach wymagających wykrywania zmian w podłożu, np. w robotach typu linefollower. Pololu 4348