")


30,93 zł Netto
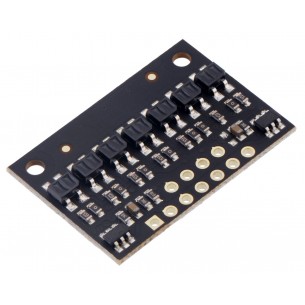
Moduł z 4 transoptorem typu QTRX z wyjściem analogowym. Moduł zasilany napięciem 2,9 - 5,5V, wykrywa obiekty w odległości do 40 mm. Czujnik znajdzie zastosowanie w projektach wymagających wykrywania zmian w podłożu, np. w robotach typu linefollower. Pololu 4444
Czujnik obiciowy składający się z szeregu 4 transoptorów typu QTRX z możliwością sterowania indywidualnie jasnością każdego z podczerwonych LED-ów. Sensory na płytce są średnio zagęszczone (MD), a odległość między nimi wynosi 8mm. Moduł może być zasilany napięciem z zakresu od 2,9 V do 5,5 V i niezależnie od napięcia zasilania pobiera prąd do 9 mA. Optymalna odległość czujnika od podłoża to 10 mm, a maksymalna odległość wynosi 40 mm. Moduł idealnie nadaje się do wykrywania zmian w odbiciu światła, dzięki czemu może być stosowany do wykrywania krawędzi podłoża lub do śledzenia linii w robotach typu linefollower.
Cechy
Producent BTC Korporacja sp. z o. o. Lwowska 5 05-120 Legionowo Polska sprzedaz@kamami.pl 22 767 36 20
Osoba odpowiedzialna BTC Korporacja sp. z o. o. Lwowska 5 05-120 Legionowo Polska sprzedaz@kamami.pl 22 767 36 20
Podwozie Romi Chassis Kit to idealna baza do budowy niewielkiego robota mobilnego. W zestawie znajdziemy wszystkie niezbędne elementy mechaniczne do budowy kołowego robota mobilnego. Zestaw do samodzielnego montażu. Pololu 3502
Płytka z mikrokontrolerem SAMD21 z rdzeniem CortexM0+ (48 MHz, 256 kB Flash, 32 kB RAM). Wyposażona w moduł WiFi i BT (oparte o ESP32) oraz jednostkę IMU LSM6DS3. Idealny do zastosowań w obszarze IoT. Arduino ABX00027
Dwukanałowy sterownik silników DC zasilany napięciem od 2,5 do 9,5V o maksymalnym prądzie ciągłym 1A na kanał. Posiada wbudowany regulator napięcia. Cytron Maker Drive
QTR-1RC Reflectance Sensor (2-Pack)
Brak towaru
Matryca QTR-3A umożliwia precyzyjny analogowy pomiar odbicia podłoża w kompaktowej formie. Matryca sprawdza się w robotach śledzących linię i systemach detekcji kontrastu, oferując niezależne kanały pomiarowe oraz łatwą integrację z mikrokontrolerami wyposażonymi w przetworniki ADC. Pololu 2456
Brak towaru
Czujnik line follower dla robotów RedBot z sensorem QRE1113GR z 3-pinowym złączem, zasilanie 5V, pobór prądu 25mA. SEN-11769
Brak towaru
Czujnik odbiciowy pozwala na "śledzenie linii", co jest podstawą działania robotów takich, jak na przykład Line Follower; może także posłużyć do wykrywania krawędzi. DFRobot SEN0017
Moduł z ośmioma czujnikami QRE1113 przeznaczony do budowy robotów line follower. Moduł komunikuje się przez interfejs I2C, zasilany jest napięciem 5V, jest wyposażony w diody LED sygnalizujące odczyty sensorów oraz regulację jasności IR. SEN-13582
Brak towaru
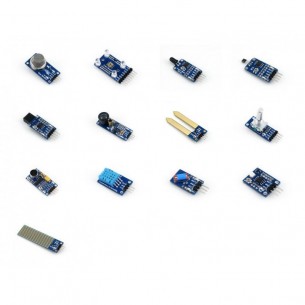
W komplecie: czujnik gazu, czujnik koloru, czujnik płomieni, czujnik Halla, czujnik odbiciowy podczerwieni, laserowy czujnik odległości, laserowy czujnik wilgotności gleby, enkoder, czujnik dźwięku, czujnik temperatury i wilgotności, czujnik wychylenia, czujnik UV oraz czujnik poziomu cieczy. Moduły są kompatybilne z Arduino
Czujnik odbiciowy IR (podczerwień) firmy Waveshare pozwala na śledzenie linii, co jest podstawą działania robotów line follower, może także posłużyć do wykrywania krawędzi. Czujnik ma wyjście analogowe i cyfrowe, czułość czujnika jest regulowana. Waveshare Infrared Reflective Sensor
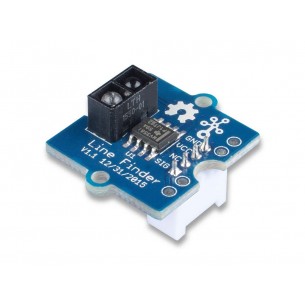
Moduł z czujnikiem odbiciowym (czujnikiem linii) RS-06WD. Płytka została wyposażona w złącze Grove i komunikuje się przez interfejs cyfrowy. Seeed Studio 101020172
Moduł z 7 transoptorami typu QTR z wyjściem analogowym. Moduł zasilany napięciem 2,9 - 5,5V, wykrywa obiekty w odległości do 40 mm. Czujnik znajdzie zastosowanie w projektach wymagających wykrywania zmian w podłożu, np. w robotach typu linefollower. Pololu 4207
Moduł z 7 transoptorami typu QTR z wyjściem RC (cyfrowym). Moduł zasilany napięciem 2,9 - 5,5V, wykrywa obiekty w odległości do 40 mm. Czujnik znajdzie zastosowanie w projektach wymagających wykrywania zmian w podłożu, np. w robotach typu linefollower. Pololu 4107
Moduł z 7 transoptorem typu QTRX z wyjściem analogowym. Moduł zasilany napięciem 2,9 - 5,5V, wykrywa obiekty w odległości do 40 mm. Czujnik znajdzie zastosowanie w projektach wymagających wykrywania zmian w podłożu, np. w robotach typu linefollower. Pololu 4407
Moduł z 7 transoptorem typu QTRX z wyjściem RC (cyfrowym). Moduł zasilany napięciem 2,9 - 5,5V, wykrywa obiekty w odległości do 40 mm. Czujnik znajdzie zastosowanie w projektach wymagających wykrywania zmian w podłożu, np. w robotach typu linefollower. Pololu 4307
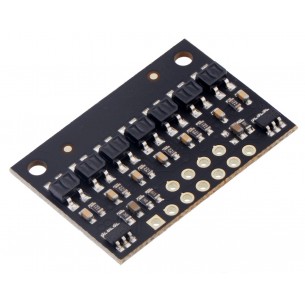
Moduł z 4 transoptorami typu QTR z wyjściem RC (cyfrowym). Moduł zasilany napięciem 2,9 - 5,5V, wykrywa obiekty w odległości do 40 mm. Czujnik znajdzie zastosowanie w projektach wymagających wykrywania zmian w podłożu, np. w robotach typu linefollower. Pololu 4104
Brak towaru
Moduł z 2 transoptorami typu QTR z wyjściem RC (cyfrowym). Moduł zasilany napięciem 2,9 - 5,5V, wykrywa obiekty w odległości do 30 mm. Czujnik znajdzie zastosowanie w projektach wymagających wykrywania zmian w podłożu, np. w robotach typu linefollower. Pololu 4102
Moduł z 4 transoptorami typu QTR z wyjściem analogowym. Moduł zasilany napięciem 2,9 - 5,5V, wykrywa obiekty w odległości do 40 mm. Czujnik znajdzie zastosowanie w projektach wymagających wykrywania zmian w podłożu, np. w robotach typu linefollower. Pololu 4204
Moduł z 4 transoptorem typu QTRX z wyjściem analogowym. Moduł zasilany napięciem 2,9 - 5,5V, wykrywa obiekty w odległości do 40 mm. Czujnik znajdzie zastosowanie w projektach wymagających wykrywania zmian w podłożu, np. w robotach typu linefollower. Pololu 4444