- Obecnie brak na stanie



Pololu 1550 - Dagu Rover 5 platforma gąsienicowa (2 silniki, bez enkoderów)
Dagu Rover 5 Tracked Chassis
This tracked chassis from Dagu Electronics makes a great base for building a small, tank-like RC vehicle or autonomous robot. The chassis includes a battery holder and two DC motors, with an independent drive train for each tread, so all you need to add to make a complete robot is a robot controller and the sensors of your choosing. A unique mechanism allows you to configure the clearance of the chassis by adjusting the angle of the gearbox assemblies. This version of the chassis does not have encoders.
 |
| Dagu Rover 5 tracked chassis, top view. |
|---|
 |
| Dagu Rover 5 tracked chassis with encoders, top view. |
|---|
The Rover 5 tracked chassis, made by Dagu Electronics, is a durable robot platform with caterpillar treads that let it drive over many types of surfaces and uneven terrain. All you need to get the chassis moving is a robot controller or motor controller to drive the two built-in DC motors, which powered by the included 6-AA battery holder (AA batteries sold separately). A small Phillips screwdriver and an Allen wrench are included for working with the chassis.
The chassis features a rugged white plastic body with room to house the included battery holder and some additional electronics. The two powerful motors with 86.8:1 gearboxes are strong enough to lift the weight of the chassis and allow it to achieve speeds as high as 10 in/s (25 cm/s). We offer two versions of the Rover 5: with and without quadrature encoders; the encoders provide a resolution of 1000 counts per three revolutions of the wheel, or 333.33 CPR (counting both rising and falling edges of both encoder channels).
A unique feature of this chassis is the ability to adjust its height—and, therefore, the clearance under its body—by changing the angles at which the gearbox assemblies are mounted on the body. Interlocking teeth on the body and the gearboxes hold them in place and allow you to make adjustments in 5° increments by unscrewing a metal bracket inside the chassis, removing a gearbox, and reinserting it at a different angle. The elastic rubber tracks maintain sufficient tension with several different gearbox angles, allowing the chassis height to vary by nearly 1.5" (3.8 cm).
|
|
The outer dimensions of the chassis are approximately 9.5" long, 9" wide, and 3" tall in its default, flattened configuration (with the front and rear gearboxes mounted at an angle of 180° to each other).
 |
| Dagu Rover 5 tracked chassis, bottom view, showing adjustable gearbox assemblies. |
|---|
This chassis is compatible with our 1/8" acrylic RP5 expansion plates, which are available in narrow and wide versions and make it easy to add your control electronics, sensors, wireless modules, servos, etc. The plates feature flexible mounting hole patterns and include four tapping screws to mount the plate to the chassis (although we have noticed a misalignment between the mounting holes on the expansion plates and the Rover 5, so you might only be able to secure two of the screws on opposing corners). The plates come in 8 colors.
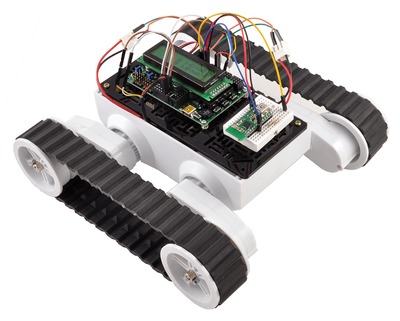 |
| Dagu Rover 5 chassis with Orangutan SVP robot controller and additional electronics mounted to an RP5 expansion plate (narrow). |
|---|
With only four motor leads and two battery leads, it is easy to interface the chassis with most dual motor controllers and robot controllers. Simply connect the battery holder leads to the controller’s power source and the motor leads to the controller’s motor driver outputs. Each set of motor leads is terminated with a female 3.96 mm pitch, 3-pin JST VH-style connector (the middle pin is not used), which our male premium jumper wires plug into nicely.
The TReX Jr dual motor controller makes it easy to turn this chassis into a platform that can be controlled by RC signals or serial commands, or you can accomplish the same thing by pairing two of our newer Simple Motor Controllers. The Orangutan SV-328 or Baby Orangutan robot controllers work well with this chassis and make it easy to get an autonomous robot up and running (note: the stall current exceeds the ratings for these robot controllers, so make sure to avoid stalling the motors).
The Rover 5 chassis with encoders has two additional bundles of wires, each containing the leads for the quadrature encoder’s 5 V power (red), ground (black), and signal (white and yellow) connections; the wires are individually terminated with female connectors that mate with 0.1" (2.54 mm) male headers. Our Pololu AVR Library provides wheel encoder functions that make it easy to use these encoders for position feedback on an Orangutan, and the Orangutan SVP (pictured above) has dedicated inputs for dual quadrature encoders and an auxiliary MCU preprogrammed to process encoder signals.
Here is a simple C program for the Orangutan robot controllers that gets your Rover 5 chassis moving:
// Orangutan Rover 5 Demo Program
#include <avr/io.h> // provides ATmega-specific definitions/macros
#include <pololu/orangutan.h> // provides Pololu AVR library routines (LCD, motors, etc.)
int main()
{
clear(); // clear the LCD, set cursor to the start of the first LCD line
print("Tracked"); // print to the top line of the LCD
lcd_goto_xy(0, 1); // go to the start of the second LCD line
print("Chassis"); // print to the bottom line of the LCD
while (!button_is_pressed(ALL_BUTTONS)) {} // wait until a user button is pressed
delay_ms(500); // wait for 0.5 s
while (1) // loop forever
{
set_motors(255, 255);
delay_ms(5000);
set_motors(255, -255);
delay_ms(5000);
set_motors(-255, 255);
delay_ms(5000);
set_motors(-255, -255);
delay_ms(5000);
}
return 0;
}
Producent BTC Korporacja sp. z o. o. Lwowska 5 05-120 Legionowo Polska sprzedaz@kamami.pl 22 767 36 20
Osoba odpowiedzialna BTC Korporacja sp. z o. o. Lwowska 5 05-120 Legionowo Polska sprzedaz@kamami.pl 22 767 36 20
Gąsienicowa platforma wyposażona w silniki DC. Wykonana została ze stopu aluminium, pozwala na sprawne poruszanie się po dowolnym podłożu. Zestaw do montażu. DFRobot ROB0128
Brak towaru
Zmontowany uniwersalny moduł zasilający 24V. AVT1895/24 C
Brak towaru
ZEGAR CYFROWY Z WYŚWIETLACZEM ANALOGOWYM - PŁYTKA DRUKOWANA I ZAPROGRAMOWANY UKŁAD
Brak towaru
Brak towaru
Zestaw 5 samoprzylepnych tagów UHF RFID w postaci pasków o bardzo małej grubości. Posiadają 64-bitowy unikatowy identyfikator, posiadają możliwość odczytu oraz zapisuj na wbudowanej pamięci (512 bitów). SparkFun WRL-14151
Brak towaru
Wyświetlacz LCD 4x40, 190x54mm, LED backlight (yellow-green), enhanced temperature range, RoHS
Brak towaru
Brak towaru
MIERNIK MOCY SKUTECZNEJ WZMACNIACZA AUDIO - PROGRAMOWY - PŁYTKA DRUKOWANA I ZAPROGRAMOWANY UKŁAD
Brak towaru
Model "Steampunk Zegar" od Ugears to łatwy w montażu, wykonany z naturalnych materiałów zegar biurkowy w stylu steampunk, cechujący się unikalnym mechanizmem z asynchronicznymi wskazówkami i filigranową snycerką na elementach dekoracyjnych, stanowiący doskonały początek dla początkujących entuzjastów mechaniki. UGears 70093
Brak towaru
Chwytak służy do precyzyjnych operacji przy wymianie układów SMD i BGA. Umożliwia podnoszenie małych elementów elektronicznych, bez konieczności używania pęsety
Brak towaru
Brak towaru
Brak towaru
PmodCON2 to moduł ze złączami BNC, umożliwia podłączenie przewodów BNC do płyt prototypowych lub układów FPGA. Digilent 210-066
Brak towaru
HSET06 PEREL Zestaw wkrętaków precyzyjnych 6 sztuk firmy VELLEMAN
Brak towaru
Brak towaru
Płytka z modułem WiFi i Bluetooth LE Espressif ESP32-S3-WROOM-1. Oferuje 8 MB pamięci Flash i 8 MB PSRAM. Espressif Systems ESP32-S3-DevKitC-1-N8R8
Brak towaru
Brak towaru
Pololu 1550 - Dagu Rover 5 platforma gąsienicowa (2 silniki, bez enkoderów)