- Obecnie brak na stanie







Zestaw do budowy robota mobilnego z podwoziem Mecanum na bazie Raspberry Pi. Wyposażony w moduł rozszerzeń Raspberry Pi Build HAT i kamerę 5 MP. Waveshare BuildMecar-Kit-B
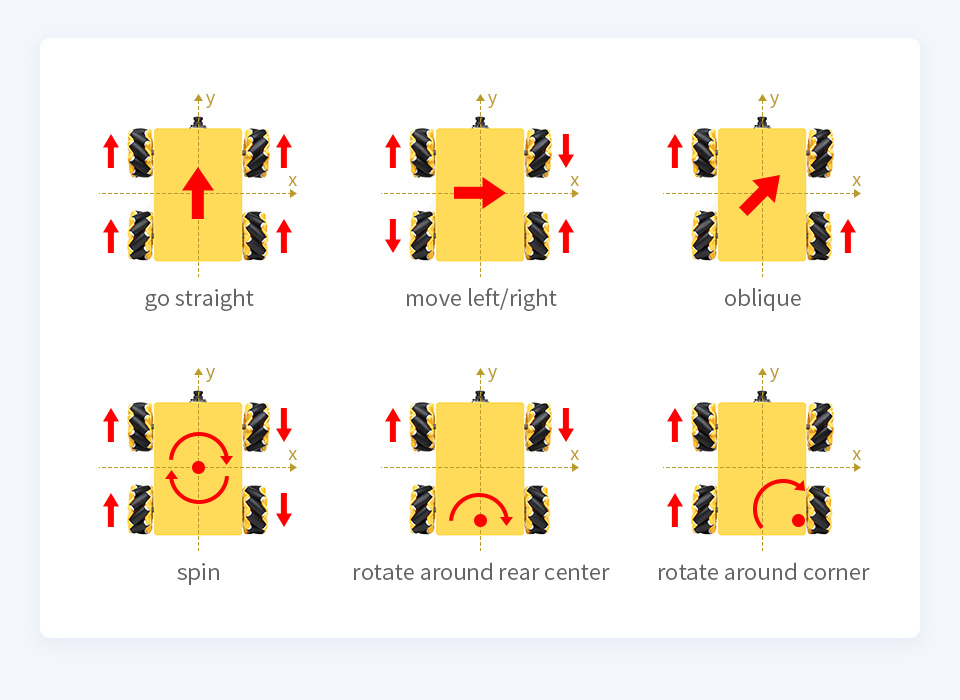
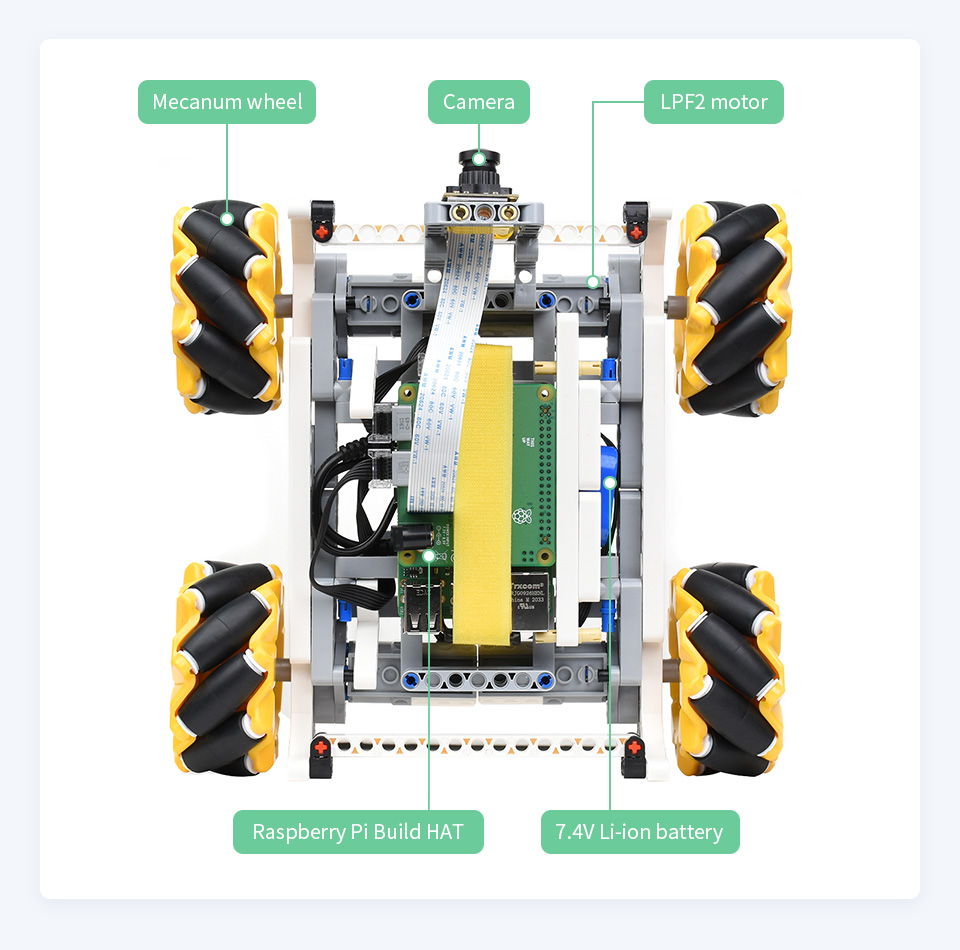
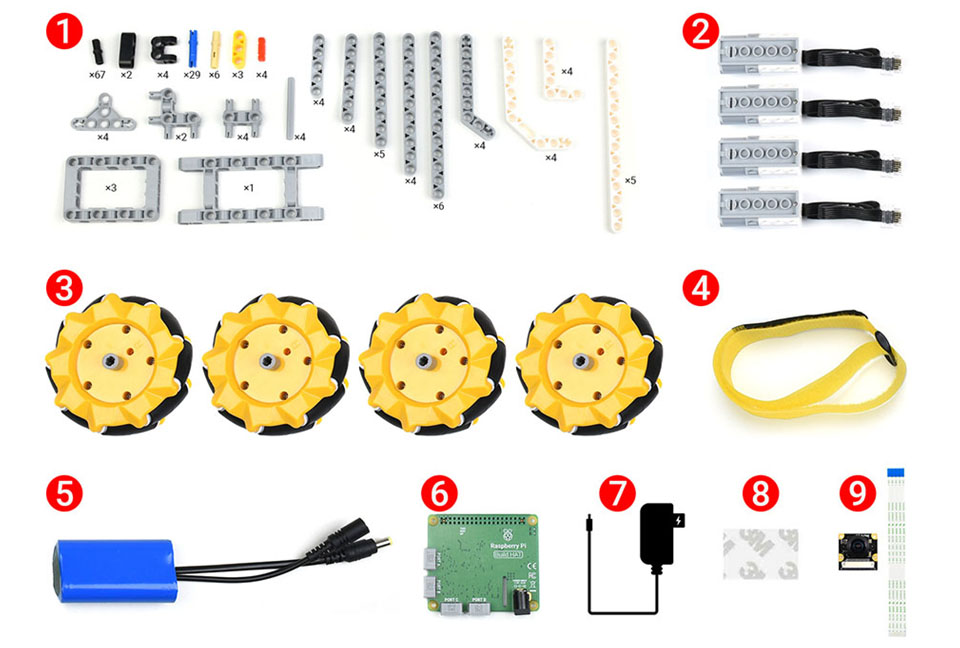
Zestaw do budowy robota mobilnego z podwoziem Mecanum na bazie minikomputera Raspberry Pi. Konstrukcja oparta została o zestaw klocków pozwalających w łatwy sposób modyfikować pojazd i dostosowywać go do własnych potrzeb. Robot napędzany jest za pomocą czterech silników prądu stałego oraz kół Mecanum, które pozwalają na poruszanie się nie tylko do przodu i do tyłu, ale także na boki, co znacznie zwiększa jego mobilność i stanowi ciekawą alternatywę dla standardowych układów napędowych.
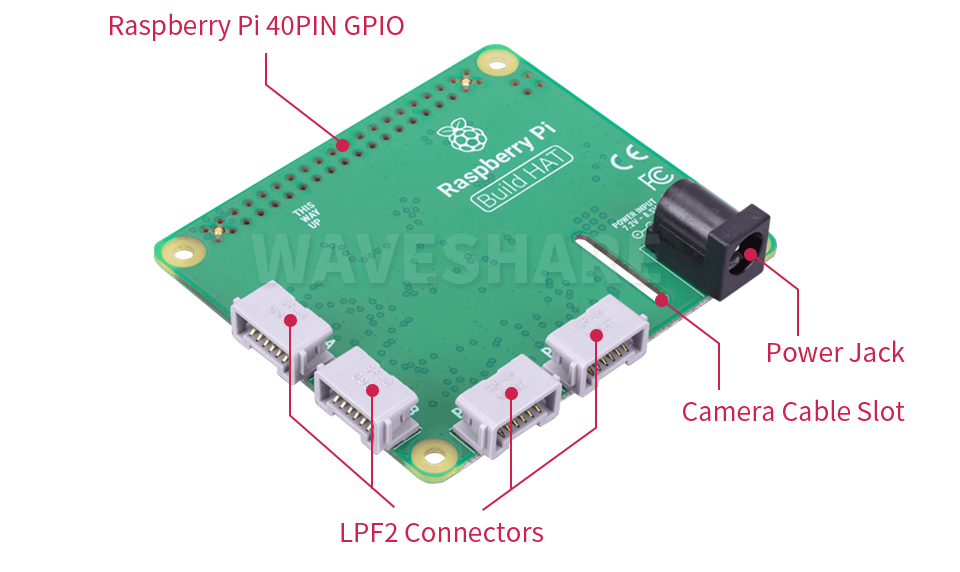
Robot wykorzystuje sterownik Raspberry Pi Build HAT, czyli oficjalną płytkę rozszerzeń zaprojektowana we współpracy z LEGO® Education. Została stworzona, aby ułatwić sterowanie silnikami i czujnikami LEGO za pomocą minikomputerów RPi. HAT wyposażony jest w cztery złącza do silników i czujników LEGO Technic z serii LEGO® Education SPIKE™ Prime.
Zestaw zasilany jest akumulatorem Li-Ion 7,4 V. W skład zestawu wchodzi również kamera 5 MP z sensorem OV5647 wyposażona w obiektyw szerokokątny o kącie widzenia 160°.
Biblioteka Build HAT Python pozwala sterować różnymi silnikami i czujnikami za pomocą złącza LPF2, co umożliwia tworzenie kreatywnych kombinacji za pomocą nakładki Build HAT i bloków konstrukcyjnych. Pełna dokumentacja oraz przykłady konfiguracji dostępne są na stronie produktu.
Producent BTC Korporacja sp. z o. o. Lwowska 5 05-120 Legionowo Polska sprzedaz@kamami.pl 22 767 36 20
Osoba odpowiedzialna BTC Korporacja sp. z o. o. Lwowska 5 05-120 Legionowo Polska sprzedaz@kamami.pl 22 767 36 20
Najnowsza wersja komputera z serii Raspberry Pi: Raspberry Pi 4 model B z czterordzeniowym SoC (Broadcom BCM2711, Cortex-A72) pracującym z częstotliwością 1,8GHz, 1GB pamięci RAM LPDDR4, układ graficzny Broadcom VideoCore VI.
Najnowsza wersja komputera z serii Raspberry Pi: Raspberry Pi 4 model B z czterordzeniowym SoC (Broadcom BCM2711, Cortex-A72) pracującym z częstotliwością 1,8GHz, 2GB pamięci RAM LPDDR4, układ graficzny Broadcom VideoCore VI.
Długo oczekiwany komputer Raspberry Pi 4 model B z czterordzeniowym układem SoC Broadcom BCM2711 (4 x Cortex-A72) pracującym z taktowaniem 1,8GHz, pamięcią RAM LPDDR4 o pojemności 4 GB i układem graficznym Broadcom VideoCore VI
Długo oczekiwany komputer Raspberry Pi 4 model B z czterordzeniowym układem SoC Broadcom BCM2711 (4 x Cortex-A72) pracującym z taktowaniem 1,8GHz, pamięcią RAM LPDDR4 o pojemności 8 GB i układem graficznym Broadcom VideoCore VI
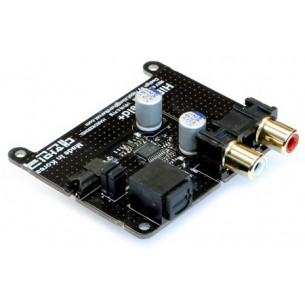
Odroid HiFi Shield Plus to wysokiej jakości karta dźwiękowa oparta na przetworniku Burr-Brown PCM5102 dla komputerów Odroid C1+ i C2, karta ma wyjścia analogowe stereo oraz wyjście S/PDIF. Karta korzysta z interfejsu I2S komputerów Odroid
Brak towaru
Webduino Smart to moduł IoT firmy Banana Pi, moduł oparty jest na układzie ESP8266 (WiFi), wyposażony jest w diodę RGB, fotosensor oraz przycisk. Aplikacje IoT można tworzyć w graficznym środowisku Blockly
Brak towaru
Linklt Smart 7688 Duo to moduł IoT oparty na układzie MT7688 firmy MediaTek działający pod kontrolą dystrybucji systemu operacyjnego Linux wywodzącej się z OpenWrt, dodatkowo wyposażony jest w mikrokontroler ATmega32U4, dzięki temu możliwe jest uruchamianie aplikacji Arduino przeznaczonych dla Arduino Yun. Seeed Studio 102110017
Brak towaru
32-bitowy mikrokontroler z rdzeniem ARM Cortex-M0, XMC1200, 32kB Flash, VQFN24, Infineon
Brak towaru
32-bitowy mikrokontroler z rdzeniem ARM Cortex-M0, XMC1200, 32kB Flash, TSSOP-28, Infineon
Brak towaru
Shield GSM/GPRS/GPS (B) firmy Waveshare oparty na module SIM808. Shield wyposażony jest w RTC, interfejs Bluetooth 3.0 i konwerter UART-USB. W komplecie jest zasilacz oraz anteny. Waveshare GSM/GPRS/GPS Shield (B)
Brak towaru
Płytka drukowana i zaprogramowany układ do gry elektronicznej SNAKE. AVT5554 A+
Brak towaru
Zestaw AVT do samodzielnego montażu gry elektronicznej SNAKE. AVT5554 B
Brak towaru
Zmontowana gra elektroniczna SNAKE. AVT5554 C
Brak towaru
Płytka drukowana i zaprogramowany układ do nieskomplikowanego termometra - rejestratora. AVT5573 A
Brak towaru
Zestaw AVT do samodzielnego montażu nieskomplikowanego termometra - rejestratora. AVT5573 B
Brak towaru
Zmontowany nieskomplikowany termometr - rejestrator. AVT5573 C
Brak towaru
Płytka drukowana do miniaturowej klawiatury USB do Raspberry PI. AVT1939 A
Brak towaru
Płytka drukowana do interfejsu z układem. AVT5557 A
Brak towaru
Zestaw AVT do samodzielnego montażu interfejsu z układem FT311D. AVT557 B
Brak towaru
Zmontowany interfejs z układem FT5557D. AVT5557 C
Brak towaru
Zestaw do budowy robota mobilnego z podwoziem Mecanum na bazie Raspberry Pi. Wyposażony w moduł rozszerzeń Raspberry Pi Build HAT i kamerę 5 MP. Waveshare BuildMecar-Kit-B