54,41 zł Netto
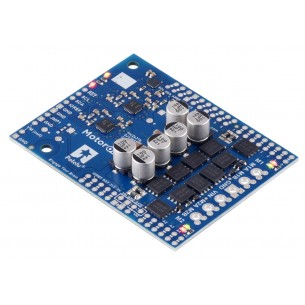
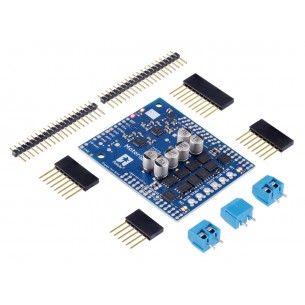
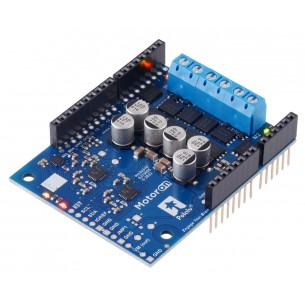
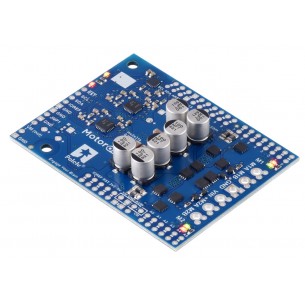
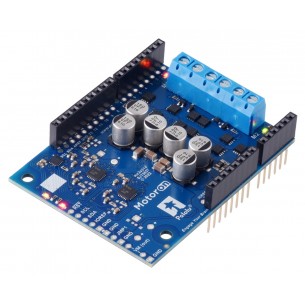
Moduł z 2-kanałowym sterownikiem silników DC do płytek Arduino. Pozwala na sterowanie napędami o napięciu zasilania od 6 do 32 V i poborze prądu do 0,65 A. Pololu 2512
Moduł z 2-kanałowym sterownikiem silników DC dedykowany do płytek Arduino. Pozwala na sterowanie napędami o napięciu zasilania od 6 do 32 V i poborze prądu do 0,65 A. Wbudowana funkcja kontroli prądu ogranicza maksymalny chwilowy prąd silnika do około 0,9 A na kanał, dzięki czemu moduł dobrze nadaje się do niskoprądowych silników wysokonapięciowych. Sterownik wyposażony został w zabezpieczenie przed odwrotną polaryzacją, przegrzaniem, zwarciem i zbyt wysokim napięciem. Użytkownik ma do dyspozycji bibliotekę Arduino, która znacznie ułatwia rozpoczęcie pracy z zestawem.
Producent BTC Korporacja sp. z o. o. Lwowska 5 05-120 Legionowo Polska sprzedaz@kamami.pl 22 767 36 20
Osoba odpowiedzialna BTC Korporacja sp. z o. o. Lwowska 5 05-120 Legionowo Polska sprzedaz@kamami.pl 22 767 36 20
Płytka z mikrokontrolerem ATmega2560 (256 kB Flash, 8 kB RAM, 4 kB EEPROM) taktowany zegarem 16 MHz. Konwerter USB-UART oparty o układ ATmega16u2. Do dyspozycji użytkownika jest m.in.: 54 linie I/O, 14 kanałów PWM, 16 wejść analogowych.
Brak towaru
Płytka uruchomieniowa z mikrokontrolerem ATmega32u4 (AVR), 20 linii I/O, 7 kanałów PWM, kwarc 16 MHz, micro-USB. Dostępne są łatwe w użyciu biblioteki obsługi USB, czujników, wyświetlaczy itp.
Brak towaru
Arduino Uno Rev3 to popularna płytka z mikrokontrolerem Atmel ATmega328 z rodziny AVR, do dyspozycji użytkownika jest 14 linii I/O, 6 kanałów PWM, 6 wejść analogowych. Dodatkowy mikrokontroler ATmega16U4 realizuje komunikację przez interfejs USB. Arduino A000066
Arduino DUE to płytka z mikrokontrolerem Atmel SAM3X8E (ARM, rdzeń Cortex-M3) taktowanym zegarem 84 MHz. Użytkownik ma do dyspozycji 54 linie I/O (w tym 12 kanałów PWM), 12 wejść analogowych, 2 przetworniki cyfrowo-analogowe. Arduino A000062
Wszechstronna płyta rozwojowa z mikrokontrolerem ATmega328P, która dzięki swojej kompatybilności z Arduino UNO i różnorodności funkcji, jest doskonałym wyborem do wielu projektów
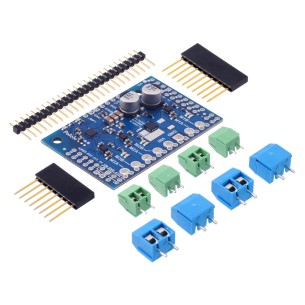
Sterownik silników DC, który pozwala na kontrolowanie ruchu trzech napędów za pomocą interfejsu I2C. Płytka z przylutowanymi złączami. Pololu 5030
Brak towaru
Sterownik silników DC, który pozwala na kontrolowanie ruchu dwóch napędów za pomocą interfejsu I2C. Płytka bez złączy. Pololu 5047
Brak towaru
Sterownik silników DC, który pozwala na kontrolowanie ruchu dwóch napędów za pomocą interfejsu I2C. Płytka ze złączami do montażu. Pololu 5046
Brak towaru
Sterownik silników DC, który pozwala na kontrolowanie ruchu dwóch napędów za pomocą interfejsu I2C. Płytka z przylutowanymi złączami. Pololu 5045
Brak towaru
Sterownik silników DC, który pozwala na kontrolowanie ruchu dwóch napędów za pomocą interfejsu I2C. Płytka bez złączy. Pololu 5044
Brak towaru
Sterownik silników DC, który pozwala na kontrolowanie ruchu dwóch napędów za pomocą interfejsu I2C. Płytka ze złączami do montażu. Pololu 5043
Brak towaru
Sterownik silników DC, który pozwala na kontrolowanie ruchu dwóch napędów za pomocą interfejsu I2C. Płytka z przylutowanymi złączami. Pololu 5042
Brak towaru
Sterownik silników DC, który pozwala na kontrolowanie ruchu dwóch napędów za pomocą interfejsu I2C. Płytka bez złączy . Pololu 5041
Brak towaru
Sterownik silników DC, który pozwala na kontrolowanie ruchu dwóch napędów za pomocą interfejsu I2C. Płytka ze złączami do montażu. Pololu 5040
Brak towaru
Sterownik silników DC, który pozwala na kontrolowanie ruchu dwóch napędów za pomocą interfejsu I2C. Płytka z przylutowanymi złączami. Pololu 5039
Brak towaru
Sterownik silników DC, który pozwala na kontrolowanie ruchu dwóch napędów za pomocą interfejsu I2C. Płytka bez złączy. Pololu 5038
Brak towaru
Sterownik silników DC, który pozwala na kontrolowanie ruchu dwóch napędów za pomocą interfejsu I2C. Płytka ze złączami do montażu. Pololu 5037
Brak towaru
Sterownik silników DC, który pozwala na kontrolowanie ruchu dwóch napędów za pomocą interfejsu I2C. Płytka z przylutowanymi złączami. Pololu 5036
Brak towaru
Sterownik silników DC, który pozwala na kontrolowanie ruchu trzech napędów za pomocą interfejsu I2C. W zestawie płytka bez złączy. Pololu 5070
Sterownik silników DC, który pozwala na kontrolowanie ruchu trzech napędów za pomocą interfejsu I2C. W zestawie płytka ze złączami do montażu. Pololu 5069
Sterownik silników DC, który pozwala na kontrolowanie ruchu trzech napędów za pomocą interfejsu I2C. W zestawie płytka z przylutowanymi złączami. Pololu 5068
Moduł z 2-kanałowym sterownikiem silników DC do płytek Arduino. Pozwala na sterowanie napędami o napięciu zasilania od 6 do 32 V i poborze prądu do 0,65 A. Pololu 2512