- Obecnie brak na stanie





LSM303DLHC 3D Compass and Accelerometer Carrier with Voltage Regulator
LSM303DLHC 3D Compass and Accelerometer Carrier with Voltage Regulator
The LSM303DLHC combines a digital 3-axis accelerometer and 3-axis magnetometer into a single package that is ideal for making a tilt-compensated compass. The six independent readings, whose sensitivities can be set in the ranges of Âą2 to Âą16 g and Âą1.3 to Âą8.1 gauss, are available through an IÂ?C interface. The carrier board operates from 2.5 to 5.5 V and has a 0.1" pin spacing.
Clearance: This board is being replaced by the newer LSM303D carrier.
Clearance: This board is being replaced by the newer LSM303D carrier, which offers several improvements over this product, including a wider magnetic sensing range and the option of using an SPI interface rather than IÂ?C. The LSM303D carrier is not pin-compatible with earlier LSM303 carriers like the LSM303DLHC and LSM303DLM.
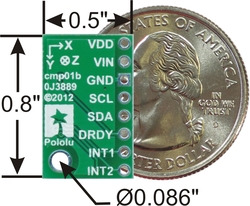 |
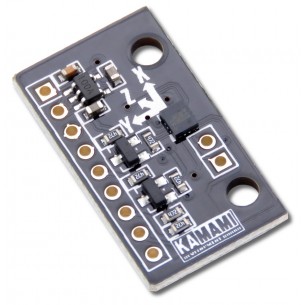
This board is a compact (0.5" A— 0.8") breakout board for ST’s LSM303DLHC 3-axis accelerometer and 3-axis magnetometer; we therefore recommend careful reading of the LSM303DLHC datasheet (629k pdf) before using this product. The LSM303DLHC is a great IC, but its small package makes it difficult for the typical student or hobbyist to use. It also operates at voltages below 3.6 V, which can make interfacing difficult for microcontrollers operating at 5 V. This carrier board addresses these issues by incorporating additional electronics, including a 3.3 V voltage regulator and level-shifting circuits, while keeping the overall size as compact as possible. The board ships fully populated with its SMD components, including the LSM303DLHC, as shown in the product picture.
Compared to the LSM303DLH and LSM303DLM used on our original compass and accelerometer carrier boards, the LSM303DLHC features improved magnetic sensing resolution and a wider acceleration measurement range (Âą2g to Âą16g). This LSM303DLHC carrier is 0.1" shorter than the earlier boards while remaining pin-compatible, although changes in IÂ?C addresses and configuration registers mean that code written to interface with an LSM303DLH or LSM303DLM might need to be modified to work with an LSM303DLHC.
The LSM303DLHC has many configurable options, including dynamically selectable sensitivities for the accelerometer and magnetometer, a choice of output data rates, and two independently-programmable external inertial interrupt pins. The magnetometer and accelerometer can be individually turned on and off to save power. The six independent magnetic and acceleration readings (sometimes called 6DOF) are available through an IÂ?C/TWI interface and can be used for many applications, including making a tilt-compensated compass that can be used to determine headings regardless of how the board is inclined (ST provides an application note (1MB pdf) that explains the details of making one).
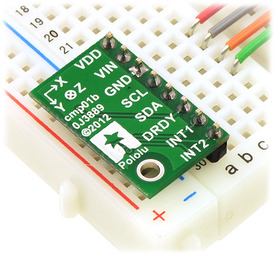
The carrier board includes a low-dropout linear voltage regulator that provides the 3.3 V required by the LSM303, which allows the sensor to be powered from a 2.5–5.5 V supply. The regulator output is available on the VDD pin and can supply almost 150 mA to external devices. The breakout board also includes a circuit that shifts the IÂ?C clock and data lines to the same logic voltage level as the supplied VIN, making it simple to interface the board with 5 V systems, and the board’s 0.1" pin spacing makes it easy to use with standard solderless breadboards and 0.1" perfboards.
For sensor fusion applications, our MinIMU-9 v2 and AltIMU-10 inertial measurement units combine the LSM303DLHC with an L3GD20 3-axis gyro on a single board, providing nine independent readings that can be used to calculate an absolute orientation. The AltIMU-10 also includes an LPS331AP pressure sensor that can be used to calculate altitude.
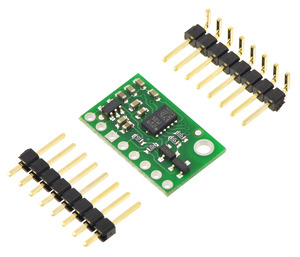
An 8A—1 strip of 0.1" header pins and an 8A—1 strip of 0.1" right-angle header pins are included, as shown in the picture below. You can solder the header strip of your choice to the board for use with custom cables or solderless breadboards, or you can solder wires directly to the board itself for more compact installations.
 |
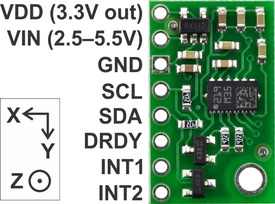
A minimum of four connections are necessary to use the LSM303DLHC: VIN, GND, SCL, and SDA. VIN should be connected to a 2.5–5.5 V source, GND to 0 volts, and SCL and SDA should be connected to an I�C bus operating at the same logic level as VIN. (Alternatively, if you are using the board with a 3.3 V system, you can leave VIN disconnected and bypass the built-in regulator by connecting 3.3 V directly to VDD.)
|
|
| PIN | Description |
|---|---|
| VDD | 3.3 V regulator output or low-voltage logic power supply, depending on VIN. When VIN is supplied and greater than 3.3 V, VDD is a regulated 3.3 V output that can supply up to approximately 150 mA to external components. Alternatively, when interfacing with a 2.5–3.3 V system, VIN can be left disconnected and power can be supplied directly to VDD. Never supply voltage to VDD when VIN is connected, and never supply more than 3.6 V to VDD. |
| VIN | This is the main 2.5–5.5 V power supply connection. The SCL and SDA level shifters pull the I�C bus high bits up to this level. |
| GND | The ground (0 V) connection for your power supply. Your IÂ?C control source must also share a common ground with this board. |
| SCL | Level-shifted IÂ?C clock line: HIGH is VIN, LOW is 0 V |
| SDA | Level-shifted IÂ?C data line: HIGH is VIN, LOW is 0 V |
| DRDY | Magnetometer data ready indicator, a 3.3V-logic-level output. HIGH (3.3 V) indicates magnetometer data can be read. LOW (0 V) indicates the magnetometer is writing new data to the data registers. This output is not level-shifted. |
| INT1 | Inertial interrupt 1, a 3.3V-logic-level output. This output is not level-shifted. |
| INT2 | Inertial interrupt 2, a 3.3V-logic-level output. This output is not level-shifted. |
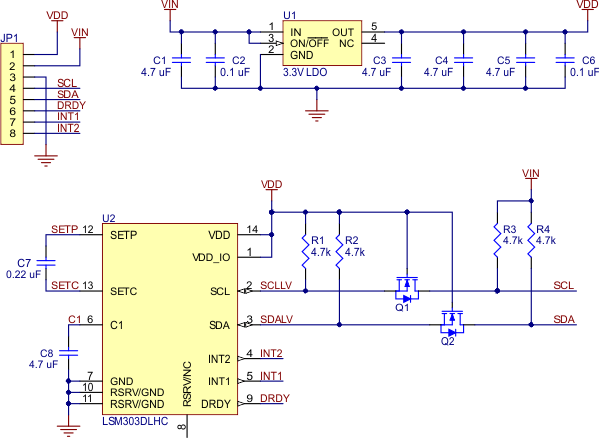 |
The above schematic shows the additional components the carrier board incorporates to make the LSM303 easier to use, including the voltage regulator that allows the board to be powered from a single 2.5–5.5 V supply and the level-shifter circuit that allows for I�C communication at the same logic voltage level as VIN.
The LSM303DLHC readings can be queried and the device can be configured through the IÂ?C bus. The module acts as two chained IÂ?C slave devices, with the accelerometer and magnetometer clock and data lines tied together to the same IÂ?C bus to ease communication. Additionally, level shifters on the IÂ?C clock (SCL) and data lines (SDA) enable IÂ?C communication with microcontrollers operating at the same voltage as VIN (2.5–5.5V). A detailed explanation of the protocol can be found in the LSM303DLHC datasheet (629k pdf), and more detailed information about IÂ?C in general can be found in NXP’s IÂ?C-bus specification (371k pdf).
The accelerometer and the magnetometer have separate 7-bit slave addresses on the IÂ?C bus. The magnetometer’s slave address is fixed to 0011110b and the accelerometer’s slave address is fixed to 0011001b.
In our tests of the board, we were able to communicate with the chip at clock frequencies up to 400 kHz; higher frequencies might work but were not tested. The chip itself and carrier board do not meet of some requirements to make the device compliant with IÂ?C fast-mode. It is missing 50 ns spike suppression on the clock and data lines, and additional pull-ups on the clock and data lines might also be necessary to achieve compliant signal timing characteristics.
The datasheet provides all the information you need to use this sensor, but picking out the important details can take some time. Here are some pointers for communicating with and configuring the LSM303DLHC that we hope will get you up and running a little bit faster:
 |
L3GD20 3-Axis Gyro Carrier with Voltage Regulator |
 |
MinIMU-9 v2 Gyro, Accelerometer, and Compass (L3GD20 and LSM303DLHC Carrier) |
 |
Female Crimp Pins for 0.1" Housings 100-Pack |
Producent BTC Korporacja sp. z o. o. Lwowska 5 05-120 Legionowo Polska sprzedaz@kamami.pl 22 767 36 20
Osoba odpowiedzialna BTC Korporacja sp. z o. o. Lwowska 5 05-120 Legionowo Polska sprzedaz@kamami.pl 22 767 36 20
KAmodLSM6DS3 to moduł pozwalający na pomiar przyspieszenia oraz wartości prędkości kątowej. Ma wbudowany stabilizator napięcia oraz translatory poziomów na liniach SDA/SCL, dzięki czemu może być wykorzystany w systemach zasilanych napięciem 2,5-5,5V
Brak towaru
Brak towaru
NanoPi NEO Core to niewielka płytka wyposażona w układ SoC Allwinner H3 oraz pamieć RAM o pojemności 256 MB. Na port GPIO wyprowadzono m.in. interfejs Ethernet, USB, SPI, UART, I2C, I2S. Płytkę mozna zasilać ze złącza Micro USB. Płytkę można zastosować jako rdzeń większego systemu.
Brak towaru
NanoPi NEO Core2, Allwinner H5 Quad-Core 1,5Ghz + 1GB RAM + 8GB eMMC, bez przylutowanych pinów GPIO
Brak towaru
NanoPi NEO Core to niewielka płytka wyposażona w układ SoC Allwinner H3 oraz pamięć RAM o pojemności 512MB. Na port GPIO wyprowadzono m.in. interfejs Ethernet, USB, SPI, UART, I2C, I2S. Płytkę można zasilać ze złącza Micro USB. FriendlyELEC NanoPi NEO Core LTS
Brak towaru
NanoPi NEO Plus 2 komputer jednopłytkowy (SoC) z procesorem Allwinner H5 Quad-Core 1GHz + 1GB RAM + 8GB eMMC, SoC (ARM Cortex A-53)
Brak towaru
Niewielki minikomputer z czterordzeniowym układem SoC Allwinner H5 (ARM Cortex-A53). Układ ma wbudowany 16-rdzeniowy koprocesor graficzny Mali450. Komputer jest wyposażony w pamięć RAM DDR3 o pojemności 512 MB. Na komputer dostępne są obrazy systemów UbuntuCore i Armbian. NanoPi NEO2
Brak towaru
NanoPi Duo to niewielka płytka wyposażona w układ SoC Allwinner H2+, pamieć RAM o pojemności 256 MB oraz wbudowany moduł Wi-Fi. Na port GPIO wyprowadzono m.in. interfejs Ethernet, USB, SPI, UART, I2C. Zestaw znakomicie sprawdzi się w lekkich aplikacjach IoT
Brak towaru
NanoPi Duo to niewielka płytka wyposażona w układ SoC Allwinner H2+, pamieć RAM o pojemności 512MB oraz wbudowany moduł Wi-Fi. Na port GPIO wyprowadzono m.in. interfejs Ethernet, USB, SPI, UART, I2C. Zestaw znakomicie sprawdzi się w lekkich aplikacjach IoT
Brak towaru
Wyświetlacz alfanumeryczny OLED 2x16, z wbudowanym kontrolerem WS0010, komunikujący się poprzez interfejs 6800, opcjonalnie 8080 lub SPI. Winstar WEH001602AB
Brak towaru
Wyświetlacz alfanumeryczny OLED 16 znaków x 2 linie, z wbudowanym kontrolerem WS0010, komunikujący się poprzez interfejs 6800, opcjonalnie 8080 lub SPI. Winstar WEH001602AR
Brak towaru
Zestaw startowy Atlas-SoC Kit z układem System-on-Chip z rodziny Cyclone V SoC, w którym zintegrowano m.in. dwurdzeniowy procesor ARM Cortex-A9 (o częstotliwości pracy 925 MHz) oraz dużą matrycę FPGA (40 000 elementów logicznych).Terasic P0419
Brak towaru
Brak towaru
Brak towaru
Moduł w postaci nakładki shield, powstały dla płytek z układem PSoC 6 firmy Cypress. Może być również używany z płytkami, które posiadają złącze w standardzie Arduino. Moduł posiada złącze dla modułów łączności Xbee, slot na karty pamięci microSD, złącze zgodne z standardem Qwiic oraz dwa przyciski. SparkFun DEV-14531
Brak towaru
Niewielki monochromatyczny wyświetlacz OLED o przekątnej 0,66 cala. Posiada rozdzielczość 64 x 48 pikseli. Do komunikacji służy interfejs I2C wyprowadzony na złączu Qwiic. Posiada sterownik SSD1306. SparkFun LCD-14532
Brak towaru
LSM303DLHC 3D Compass and Accelerometer Carrier with Voltage Regulator