- Obecnie brak na stanie
")


")

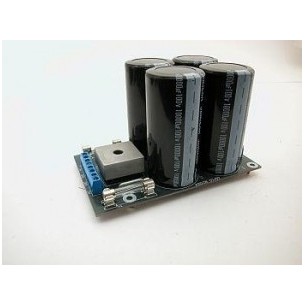
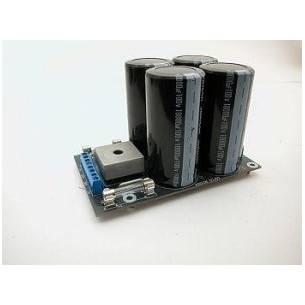
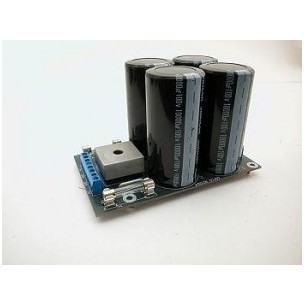
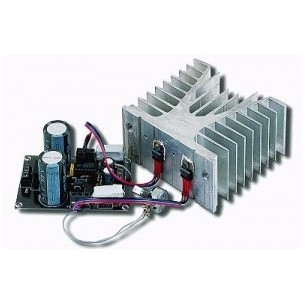
RoboClaw 2x60A with USB (V4)
RoboClaw 2x60A with USB (V4)
The RoboClaw motor controllers from Orion Robotics can control a pair of brushed DC motors using USB serial, TTL serial, RC, or analog inputs. Integrated dual quadrature decoders make it easy to create a closed-loop speed control system. This version can supply a continuous 60 A per channel (120 A peak).
This is the newer V4 revision of the RoboClaw 2×60A. It has a new board design and some new features like USB connectivity, but is otherwise similar to the original 2×60A.
The RoboClaw from Orion Robotics is an efficient, versatile, dual-channel synchronous regenerative motor controller. This version can supply two brushed DC motors with 60 A continuous at voltages from 6 to 34 V, and it allows for peak currents up to twice the maximum continuous rating. 5 A, 15 A, and 30 A versions are also available.
The RoboClaw features dual quadrature decoding capability. A built-in PID routine can be used for closed-loop speed control, maintaining motor speeds even if the load varies, or the encoder counts and speeds can be read directly from the RoboClaw for use with an external control system. Analog feedback is also supported for closed-loop position control (2×5A, 2×15A, and 2×30A only).
This RoboClaw features a USB interface that acts as a virtual serial (COM) port, allowing it to be controlled directly from a computer. Several other interface modes are supported by the RoboClaw as well: it can be controlled via TTL serial for use with an embedded system, RC hobby servo pulses for use as an RC-controlled electronic speed control (ESC), or analog voltages for use with potentiometers or analog joysticks.
 2×5A |  2×15A |  2×30A |  2×60A with USB | |
|---|---|---|---|---|
| Motor channels: | 2 | |||
| Operating voltage: | 6–34 V | |||
| Continuous output current: | 5 A | 15 A | 30 A | 60 A |
| Peak output current: | 10 A | 30 A | 60 A | 120 A |
| 5V BEC(1) max current: | 150 mA | 3 A | ||
| Width: | 1.7" (4.2 cm) | 2.1" (5.2 cm) | 3.4" (8.6 cm) | |
| Length: | 1.9" (4.8 cm) | 2.9" (7.4 cm) | 3.9" (10 cm) | |
| Weight: | 17 g | 63 g | 205 g | |
1 Battery Eliminator Circuit
Orion Robotics has written an Arduino library for the RoboClaw that makes it easy to interface these motor controllers with an Arduino. The library comes with several example sketches that demonstrate different methods of controlling the RoboClaw.
Producent BTC Korporacja sp. z o. o. Lwowska 5 05-120 Legionowo Polska sprzedaz@kamami.pl 22 767 36 20
Osoba odpowiedzialna BTC Korporacja sp. z o. o. Lwowska 5 05-120 Legionowo Polska sprzedaz@kamami.pl 22 767 36 20
Brak towaru
Brak towaru
Brak towaru
Brak towaru
Brak towaru
Brak towaru
Brak towaru
Brak towaru
Brak towaru
Brak towaru
Brak towaru
Brak towaru
Brak towaru
Brak towaru
Brak towaru
Brak towaru
RoboClaw 2x60A with USB (V4)