- Obecnie brak na stanie


Janusz Halawa
Coraz lepsze są programy do wykonywania działań na wyrażeniach matematycznych (np. Mathematica). Aby efektywnie wykorzystać możliwości obliczeniowe komputerów, należy opanować teoretyczne podstawy dynamiki układów i ich programowania.
Niniejsza monografia jest poświęcona temu celowi. Zawiera elementy teorii równań różnicowych i różniczkowych zwyczajnych i cząstkowych, które mają na celu ułatwić Czytelnikowi zrozumienie wykresów odpowiedzi obiektów i zamkniętych układów regulacji.
Część monografii jest poświęcona sterowaniu obiektami z opóźnieniem. Dobór parametrów regulatorów sterujących tymi obiektami jest bardziej skomplikowany niż w przypadku obiektów bez opóźnień. Do wyznaczania parametrów regulatorów w zamkniętych układach zawierających obiekty z opóźnieniem autor zastosował niektóre własne rozwiązania, mając nadzieję, że znajdą one zastosowanie w praktyce inżynierskiej.
Spis treści
Wprowadzenie
1. Zasada najmniejszego działania
2. Metoda Lagrange'a
3. Wyznaczanie uproszczonych modeli matematycznych z praw fizyki
4. Równania różniczkowe opisujące podstawowe obiekty sterowania
5. Symulacja układów opisanych transmitancjami
6. Układy nieliniowe
7. Wyznaczanie modeli uproszczonych
8. Zamknięty układ sterowania
9. Wyznaczanie parametrów regulatorów
10. Współczynniki wrażliwości
11. Układy z opóźnieniem
12. Równania różnicowe
13. Uwagi o dynamice układów impulsowych
14. Regulacja ekstremalna
15. Układ regulacji adaptacyjnej
16. Wprowadzenie do zbiorów rozmytych
17. Wprowadzenie do całkowania numerycznego
18. Wzory numerycznego obliczania pochodnych pierwszego rzędu za pomocą 3 i 4 punktów
19. Równania cząstkowe
20. Wybrane działania w programie Mathematica
21. Literatura.
Arduino Ethernet Rev3 WITH PoE - płytka z mikrokontrolerem ATmega328 z rodziny AVR. Płytka wyposażona jest w kontroler Ethernet WizNet5100 i moduł zasilania PoE. Dodatkowym wyposażeniem są m.in.: gniazdo kart micro-SD. A000074
Brak towaru
Arduino Ethernet Rev3 WITHOUT PoE - płytka z mikrokontrolerem ATmega328 z rodziny AVR. Płytka wyposażona jest w kontroler Ethernet WizNet5100 (brak modułu zasilania PoE). Dodatkowym wyposażeniem są m.in.: gniazdo kart micro-SD. A000068
Brak towaru
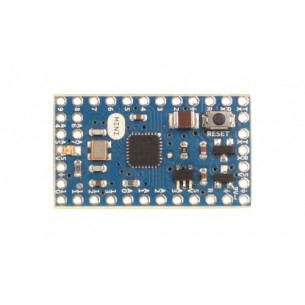
Arduino Mini to moduł przeznaczony do użytkowania na płytce stykowej. Wersja 05 ma mikrokontroler ATmega328 z rodziny AVR w mniejszej obudowie, co umożliwia umieszczenie wszystkich komponentów na jednej stronie płytki. Płytka ma przycisk reset. Wersja 05 ma tak samo rozmieszczone piny jak wersja 04. A000087
Brak towaru
Arduino Mini to moduł przeznaczony do użytkowania na płytce stykowej. Wersja 05 ma mikrokontroler ATmega328 z rodziny AVR w mniejszej obudowie, co umożliwia umieszczenie wszystkich komponentów na jednej stronie płytki. Płytka ma przycisk reset. Wersja 05 ma tak samo rozmieszczone piny jak wersja 04. A000088
Brak towaru
Brak towaru
Brak towaru
Brak towaru
Nakładka do komunikacji bezprzewodowej przeznaczona do płytek Arduino. Wyposażona w złącze kompatybilne z modułami Xbee oraz gniazdo kart microSD. Arduino A000065
Brak towaru
Brak towaru
Brak towaru
Brak towaru
Brak towaru
Brak towaru
Tony Olsson, David Gaetano, Jonas Odhner, Samson Wiklund
Brak towaru
Brak towaru
Brak towaru
Janusz Halawa