







")
")

80,90 zł Netto
Ten rezystancyjny czujnik firmy Tekscan jest elementem zmniejszającym swoją rezystancję przy zwiększaniu siły działającej na jego aktywny fragment w postaci pola okręgu o średnicy ok. 9,53 mm. Typowym zastosowaniem FlexiForce A201 są układy reagujące na dotyk - dzięki niewielkiej grubości (0,2 mm) i dużej giętkości sensora, możliwy jest jego montaż njego montaż np. w rękawicach operatorskich albo na zakrzywionych powierzchniach urządzeń. Zakres pomiarowy mierzonej siły mieści się w granicach od kilkudziesięciu gramów do 0,45 kg (4,4 N).

Właściwości:
Do pobrania:
Producent BTC Korporacja sp. z o. o. Lwowska 5 05-120 Legionowo Polska sprzedaz@kamami.pl 22 767 36 20
Osoba odpowiedzialna BTC Korporacja sp. z o. o. Lwowska 5 05-120 Legionowo Polska sprzedaz@kamami.pl 22 767 36 20
Czujnik ugięcia o długości 114 mm. Rezystancja czujnika zmienia się wraz z kątem wygięcia. Na końcu czujnik ma złacze 2-pinowe o rastrze 2,54 mm. SparkFun SEN-08606
Rezystancyjny czujnik siły/nacisku 77x6mm (FS-L-0055-253-ST). SEN-10264
Rezystancyjny czujnik siły FlexiForce A201 100lbs (44,8 kg). SEN-08685
Rezystancyjny czujnik siły FlexiForce A401 25lbs (11,2 kg). Sparkfun SEN-11207, DFRobot SEN0136
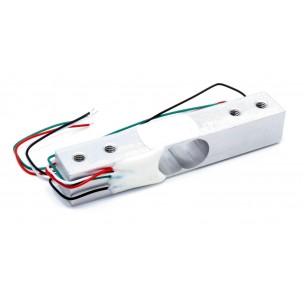
Belka tensometryczna aluminiowa, pozwalająca na pomiar masy do 2 kilogramów. Posiada cztery przewody. Znajduje zastosowanie w wagach kuchennych oraz wagach przenośnych.
Belka tensometryczna aluminiowa, pozwalająca na pomiar masy do 20 kilogramów. Posiada cztery przewody. Znajduje zastosowanie w wagach kuchennych oraz wagach przenośnych, posiada przewód o długości 21 cm, RoHS.
Brak towaru
TAS606 to sensor tensometryczny pozwalający na pomiar masy do 200kg, działa w oparciu o mostek Wheatstone\'a. Posiada ekranowany przewód sygnałowy i stopień ochrony IP66. Sparkfun SEN-13332
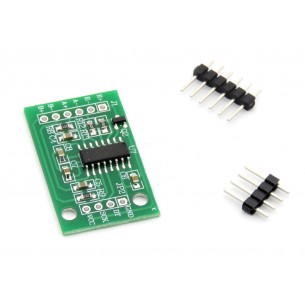
Moduł pozwala na dołączenie tensometru (pracującego w układzie mostka Wheatstone\'a) i przetworzenie sygnału analogowego na jego reprezentację cyfrową, dostępną na liniach wyjściowych modułu. Układ przetwarza sygnał z rozdzielczością 24bit i może być zasilany napięciem 2,7V - 5,5V. Moduł szczególnie polecany do konstrukcji wag cyfrowych w połączeniu z Arduino
SparkFun Load Sensor Combinator (Ver. 1.1) to płytka umożliwiająca połączenie 4 czujników obciążenia w mostek Wheatstone\'a. Umożliwia podłączenie czujnika temperatury DS18B20 oraz przesłanie sygnałów za pomocą skrętki Ethernet dzięki złączu RJ45. SparkFun BOB-13878
SparkFun OpenScale to prosty w użyciu układ pozwalający na podłączenie czujników ciężaru i temperatury. Umożliwia odczyt z wielu typów czujników ciężaru takich jak belki tensometryczne czy czujniki nacisku i w prosty sposób przesłanie danych pomiarowych do komputera użytkownika. SparkFun SEN-13261
Moduł z czujnikiem ugięcia z dwiema sondami pomiarowymi. Komunikacja przez interfejs I2C. SparkFun SEN-14666
Brak towaru
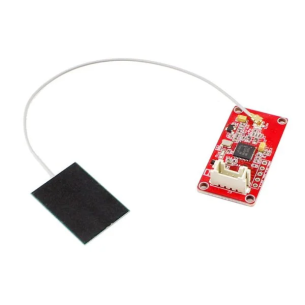
Okrągły, elastyczny, czujnik nacisku, który może być używany do realizacji bardzo czułego wykrywania siły. Czujnik jest trwały i przeznaczony do wykrywania nacisku statycznego i dynamicznego przy dużej prędkości reakcji. DFRobot SEN0298
Okrągły, elastyczny, czujnik nacisku, który cechuje się dużą czułością oraz możliwością wykrywania nawet niewielkich zmian nacisku. Sensor jest trwały i przeznaczony do wykrywania nacisku statycznego i dynamicznego przy dużej prędkości reakcji. DFRobot SEN0295
Okrągły, elastyczny, czujnik nacisku, który może być używany do realizacji bardzo czułego wykrywania siły. Czujnik jest trwały i przeznaczony do wykrywania nacisku statycznego i dynamicznego przy dużej prędkości reakcji. DFRobot SEN0294
Okrągły, elastyczny, czujnik siły nacisku, który cechuje się dużą czułością oraz możliwością wykrywania nawet niewielkich zmian nacisku. Sensor jest trwały i przeznaczony do wykrywania nacisku statycznego i dynamicznego przy dużej prędkości reakcji. DFRobot SEN0297
Brak towaru
Podłużny, elastyczny, czujnik nacisku, który cechuje się dużą czułością oraz możliwością wykrywania nawet niewielkich zmian nacisku. Sensor jest trwały i przeznaczony do wykrywania nacisku statycznego i dynamicznego przy dużej prędkości reakcji.. DFRobot SEN0293