62,03 zł Netto
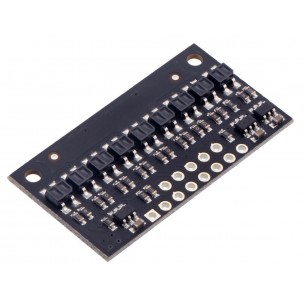
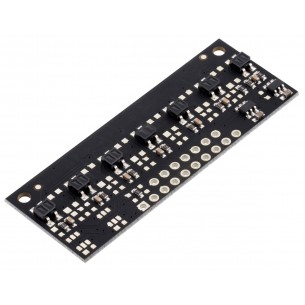
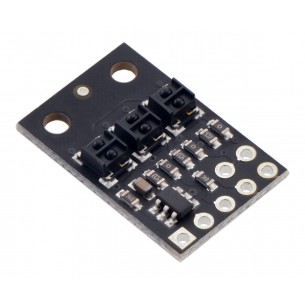
Moduł z 9 transoptorem typu QTRX z wyjściem analogowym. Moduł zasilany napięciem 2,9 - 5,5V, wykrywa obiekty w odległości do 40 mm. Czujnik znajdzie zastosowanie w projektach wymagających wykrywania zmian w podłożu, np. w robotach typu linefollower. Pololu 4409

darmowa wysyłka na terenie Polski dla wszystkich zamówień powyżej 500 PLN

Jeśli Twoja wpłata zostanie zaksięgowana na naszym koncie do godz. 11:00

Każdy konsument może zwrócić zakupiony towar w ciągu 14 dni bez zbędnych pytań
Czujnik obiciowy składający się z szeregu 9 transoptorów typu QTRX z możliwością sterowania indywidualnie jasnością każdego z podczerwonych LED-ów. Sensory na płytce są mocno zagęszczone (HD), a odległość między nimi wynosi 4mm. Moduł może być zasilany napięciem z zakresu od 2,9 V do 5,5 V i niezależnie od napięcia zasilania pobiera prąd do 22 mA. Optymalna odległość czujnika od podłoża to 10 mm, a maksymalna odległość wynosi 40 mm. Moduł idealnie nadaje się do wykrywania zmian w odbiciu światła, dzięki czemu może być stosowany do wykrywania krawędzi podłoża lub do śledzenia linii w robotach typu linefollower.
Cechy
Podwójny sterownik silników pozwalający na sterowanie dwóch silników DC napięciem 2,7-10,8V i prądem ciągłym 1,2A na kanał. Pololu 2130
Brak towaru
Zestaw do budowy podwozia 4WD w kształcie samochodu. Może służyć jako baza do budowy robota
Moduł z mikrokontrolerem ATMega4809 z rodziny AVR (48 kB Flash, 6 kB SRAM, 256 B EEPROM). Moduł ma dwa 15-pinowe złącza wyposażone w GPIO, SPI, I2C, PWM, USART, DAC i ADC. Arduino ABX00028
Moduł z 9 transoptorami typu QTR z wyjściem analogowym. Moduł zasilany napięciem 2,9 - 5,5V, wykrywa obiekty w odległości do 40 mm. Czujnik znajdzie zastosowanie w projektach wymagających wykrywania zmian w podłożu, np. w robotach typu linefollower. Pololu 4209
Moduł z 15 transoptorami typu QTR z wyjściem analogowym. Moduł zasilany napięciem 2,9 - 5,5V, wykrywa obiekty w odległości do 50 mm. Czujnik znajdzie zastosowanie w projektach wymagających wykrywania zmian w podłożu, np. w robotach typu linefollower. Pololu 4215
Moduł z 7 transoptorami typu QTR z wyjściem RC (cyfrowym). Moduł zasilany napięciem 2,9 - 5,5V, wykrywa obiekty w odległości do 40 mm. Czujnik znajdzie zastosowanie w projektach wymagających wykrywania zmian w podłożu, np. w robotach typu linefollower. Pololu 4147
Moduł z 2 transoptorem typu QTRX z wyjściem analogowym. Moduł zasilany napięciem 2,9 - 5,5V, wykrywa obiekty w odległości do 30 mm. Czujnik znajdzie zastosowanie w projektach wymagających wykrywania zmian w podłożu, np. w robotach typu linefollower. Pololu 4402
Moduł z 7 transoptorem typu QTRX z wyjściem RC (cyfrowym). Moduł zasilany napięciem 2,9 - 5,5V, wykrywa obiekty w odległości do 40 mm. Czujnik znajdzie zastosowanie w projektach wymagających wykrywania zmian w podłożu, np. w robotach typu linefollower. Pololu 4347
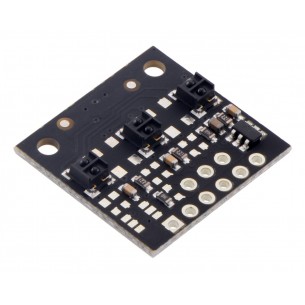
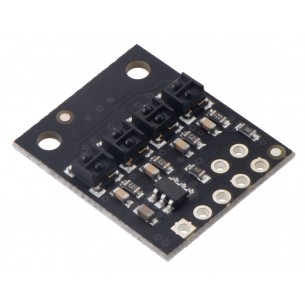
Moduł z 3 transoptorem typu QTRX z wyjściem RC (cyfrowym). Moduł zasilany napięciem 2,9 - 5,5V, wykrywa obiekty w odległości do 30 mm. Czujnik znajdzie zastosowanie w projektach wymagających wykrywania zmian w podłożu, np. w robotach typu linefollower. Pololu 4343
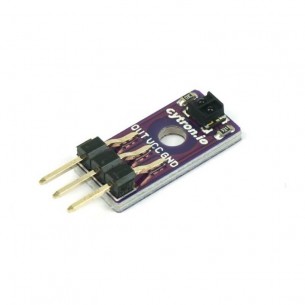
Moduł z analogowym czujnikiem odbiciowym IR. Zbudowany z diody IR oraz fototranzystora, który mierzy natężenie odbitego światła. Wykorzystywany m.in. w robotach śledzących linię. Cytron MAKER-REFLECT
Moduł z 3 transoptorem typu QTRX z wyjściem analogowym. Moduł zasilany napięciem 2,9 - 5,5V, wykrywa obiekty w odległości do 30 mm. Czujnik znajdzie zastosowanie w projektach wymagających wykrywania zmian w podłożu, np. w robotach typu linefollower. Pololu 4403
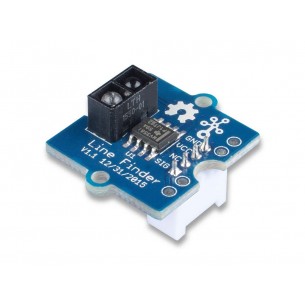
Moduł z czujnikiem odbiciowym (czujnikiem linii) RS-06WD. Płytka została wyposażona w złącze Grove i komunikuje się przez interfejs cyfrowy. Seeed Studio 101020172
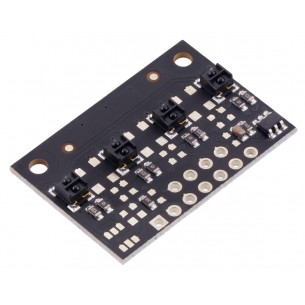
Moduł z 4 transoptorem typu QTRX z wyjściem analogowym. Moduł zasilany napięciem 2,9 - 5,5V, wykrywa obiekty w odległości do 40 mm. Czujnik znajdzie zastosowanie w projektach wymagających wykrywania zmian w podłożu, np. w robotach typu linefollower. Pololu 4444
Moduł z 1 transoptorem typu QTRX z wyjściem analogowym. Moduł zasilany napięciem 2,9 - 5,5V, wykrywa obiekty w odległości do 30 mm. Czujnik znajdzie zastosowanie w projektach wymagających wykrywania zmian w podłożu, np. w robotach typu linefollower. Pololu 4401
Moduł z 4 transoptorem typu QTRX z wyjściem RC (cyfrowym). Moduł zasilany napięciem 2,9 - 5,5V, wykrywa obiekty w odległości do 40 mm. Czujnik znajdzie zastosowanie w projektach wymagających wykrywania zmian w podłożu, np. w robotach typu linefollower. Pololu 4304
Moduł czujnika odbiciowego z 1 transoptorem typu QTRXL-HD z wyjściem analogowym. Moduł zasilany napięciem 2,9...5,5V, wykrywa obiekty w odległości do 80mm. Pololu 4641
Moduł z pięcioma czujnikami odbiciowymi ITR20001/T. Zasilany napięciem od 3,3 V do 5 V, ma wyjścia analogowe. Może wykrywać obiekty w odległości do 5 mm. Waveshare Tracker Sensor
Moduł z 3 transoptorami typu QTR z wyjściem RC (cyfrowym). Moduł zasilany napięciem 2,9 - 5,5V, wykrywa obiekty w odległości do 30 mm. Czujnik znajdzie zastosowanie w projektach wymagających wykrywania zmian w podłożu, np. w robotach typu linefollower. Pololu 4143
Moduł z 2 transoptorami typu QTR z wyjściem RC (cyfrowym). Moduł zasilany napięciem 2,9 - 5,5V, wykrywa obiekty w odległości do 30 mm. Czujnik znajdzie zastosowanie w projektach wymagających wykrywania zmian w podłożu, np. w robotach typu linefollower. Pololu 4102
Moduł z 9 transoptorem typu QTRX z wyjściem analogowym. Moduł zasilany napięciem 2,9 - 5,5V, wykrywa obiekty w odległości do 40 mm. Czujnik znajdzie zastosowanie w projektach wymagających wykrywania zmian w podłożu, np. w robotach typu linefollower. Pololu 4409