76,50 zł Netto
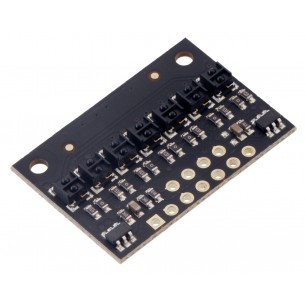
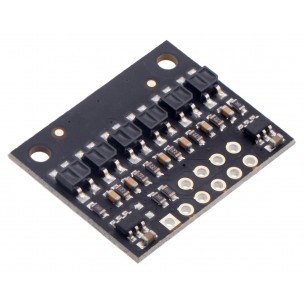
Moduł z 11 transoptorem typu QTRX z wyjściem analogowym. Moduł zasilany napięciem 2,9 - 5,5V, wykrywa obiekty w odległości do 40 mm. Czujnik znajdzie zastosowanie w projektach wymagających wykrywania zmian w podłożu, np. w robotach typu linefollower. Pololu 4411

darmowa wysyłka na terenie Polski dla wszystkich zamówień powyżej 500 PLN

Jeśli Twoja wpłata zostanie zaksięgowana na naszym koncie do godz. 11:00

Każdy konsument może zwrócić zakupiony towar w ciągu 14 dni bez zbędnych pytań
Czujnik obiciowy składający się z szeregu 11 transoptorów typu QTRX z możliwością sterowania indywidualnie jasnością każdego z podczerwonych LED-ów. Sensory na płytce są mocno zagęszczone (HD), a odległość między nimi wynosi 4mm. Moduł może być zasilany napięciem z zakresu od 2,9 V do 5,5 V i niezależnie od napięcia zasilania pobiera prąd do 26 mA. Optymalna odległość czujnika od podłoża to 10 mm, a maksymalna odległość wynosi 40 mm. Moduł idealnie nadaje się do wykrywania zmian w odbiciu światła, dzięki czemu może być stosowany do wykrywania krawędzi podłoża lub do śledzenia linii w robotach typu linefollower.
Cechy
Płytka z mikrokontrolerem SAMD21 z rdzeniem CortexM0+ (48 MHz, 256 kB Flash, 32 kB RAM). Wyposażona w moduł WiFi i BT (oparte o ESP32) oraz jednostkę IMU LSM6DS3. Idealny do zastosowań w obszarze IoT. Arduino ABX00027
Dwukanałowy sterownik silników DC zasilany napięciem od 2,5 do 9,5V o maksymalnym prądzie ciągłym 1A na kanał. Posiada wbudowany regulator napięcia. Cytron Maker Drive
Brak towaru
Aluminiowa platforma do budowy robota mobilnego. W płycie wykonano liczne otwory ułatwiające montaż silników i elektroniki. Zestaw wyposażony w 4 silniki TT oraz 4 koła wielokierunkowe Mecanum o średnicy 60 mm
Moduł z 13 transoptorami typu QTR z wyjściem RC (cyfrowym). Moduł zasilany napięciem 2,9 - 5,5V, wykrywa obiekty w odległości do 40 mm. Czujnik znajdzie zastosowanie w projektach wymagających wykrywania zmian w podłożu, np. w robotach typu linefollower. Pololu 4113
Moduł z 5 transoptorami typu QTR z wyjściem RC (cyfrowym). Moduł zasilany napięciem 2,9 - 5,5V, wykrywa obiekty w odległości do 40 mm. Czujnik znajdzie zastosowanie w projektach wymagających wykrywania zmian w podłożu, np. w robotach typu linefollower. Pololu 4145
Brak towaru
Czujnik odbiciowy z wyjściem cyfrowym. Próg może być regulowany za pomocą wbudowanego potencjometru
Moduł z 1 transoptorem typu QTRX z wyjściem RC (cyfrowym). Moduł zasilany napięciem 2,9 - 5,5V, wykrywa obiekty w odległości do 30 mm. Czujnik znajdzie zastosowanie w projektach wymagających wykrywania zmian w podłożu, np. w robotach typu linefollower. Pololu 4301
Moduł z 2 transoptorami typu QTR z wyjściem RC (cyfrowym). Moduł zasilany napięciem 2,9 - 5,5V, wykrywa obiekty w odległości do 30 mm. Czujnik znajdzie zastosowanie w projektach wymagających wykrywania zmian w podłożu, np. w robotach typu linefollower. Pololu 4102
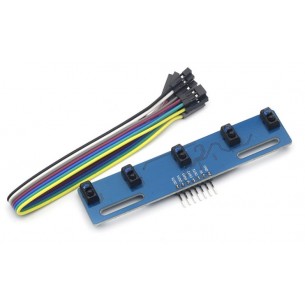
Moduł z pięcioma czujnikami odbiciowymi ITR20001/T. Zasilany napięciem od 3,3 V do 5 V, ma wyjścia analogowe. Może wykrywać obiekty w odległości do 5 mm. Waveshare Tracker Sensor
Moduł z 1 transoptorem typu QTRXL z wyjściem RC (cyfrowym). Jest zasilany napięciem od 2,9 do 5,5 V, wykrywa obiekty w odległości do 80 mm. Pololu 4541
Brak towaru
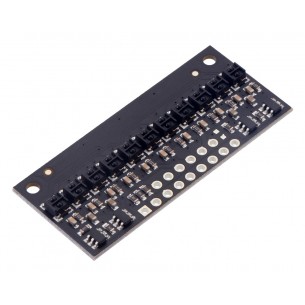
Moduł z 7 transoptorem typu QTRX z wyjściem analogowym. Moduł zasilany napięciem 2,9 - 5,5V, wykrywa obiekty w odległości do 40 mm. Czujnik znajdzie zastosowanie w projektach wymagających wykrywania zmian w podłożu, np. w robotach typu linefollower. Pololu 4407
Moduł z 11 transoptorem typu QTRX z wyjściem RC (cyfrowym). Moduł zasilany napięciem 2,9 - 5,5V, wykrywa obiekty w odległości do 40 mm. Czujnik znajdzie zastosowanie w projektach wymagających wykrywania zmian w podłożu, np. w robotach typu linefollower. Pololu 4311
Moduł czujnika odbiciowego z 1 transoptorem typu QTRXL-HD z wyjściem analogowym. Moduł zasilany napięciem 2,9...5,5V, wykrywa obiekty w odległości do 80mm. Pololu 4641
Czujnik odbiciowy IR (podczerwień) firmy Waveshare pozwala na śledzenie linii, co jest podstawą działania robotów line follower, może także posłużyć do wykrywania krawędzi. Czujnik ma wyjście analogowe i cyfrowe, czułość czujnika jest regulowana. Waveshare Infrared Reflective Sensor
Moduł z pięcioma czujnikami odbiciowymi TCRT5000. Zasilany napięciem 5 V, ma wyjścia analogowe. Może wykrywać obiekty w odległości do 15 mm
Brak towaru
Moduł z 13 transoptorami typu QTR z wyjściem analogowym. Moduł zasilany napięciem 2,9 - 5,5V, wykrywa obiekty w odległości do 40 mm. Czujnik znajdzie zastosowanie w projektach wymagających wykrywania zmian w podłożu, np. w robotach typu linefollower. Pololu 4253
Moduł z 6 transoptorami typu QTR z wyjściem RC (cyfrowym). Moduł zasilany napięciem 2,9 - 5,5V, wykrywa obiekty w odległości do 40 mm. Czujnik znajdzie zastosowanie w projektach wymagających wykrywania zmian w podłożu, np. w robotach typu linefollower. Pololu 4106
Brak towaru
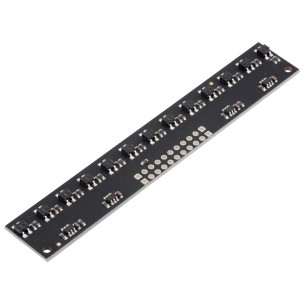
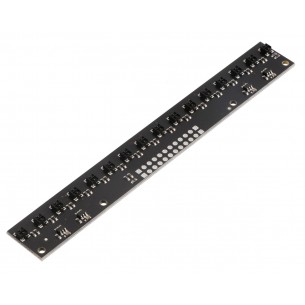
Moduł z 16 transoptorem typu QTRX z wyjściem analogowym. Moduł zasilany napięciem 2,9 - 5,5V, wykrywa obiekty w odległości do 50 mm. Czujnik znajdzie zastosowanie w projektach wymagających wykrywania zmian w podłożu, np. w robotach typu linefollower. Pololu 4456
Moduł z 15 transoptorami typu QTR z wyjściem analogowym. Moduł zasilany napięciem 2,9 - 5,5V, wykrywa obiekty w odległości do 50 mm. Czujnik znajdzie zastosowanie w projektach wymagających wykrywania zmian w podłożu, np. w robotach typu linefollower. Pololu 4215
Moduł z 11 transoptorem typu QTRX z wyjściem analogowym. Moduł zasilany napięciem 2,9 - 5,5V, wykrywa obiekty w odległości do 40 mm. Czujnik znajdzie zastosowanie w projektach wymagających wykrywania zmian w podłożu, np. w robotach typu linefollower. Pololu 4411