





3,12 zł Netto
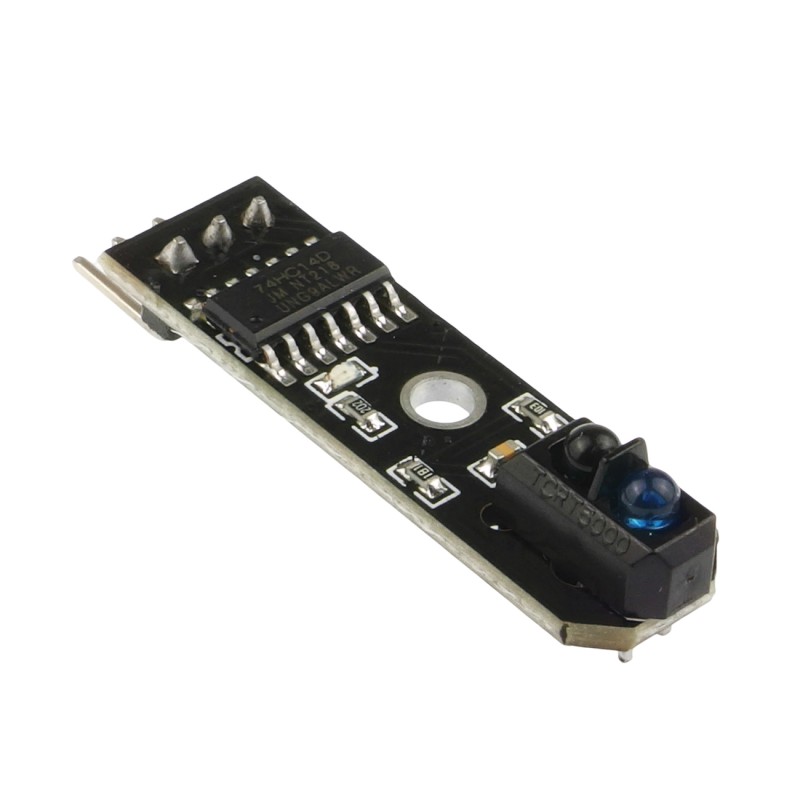
Moduł czujnika podczerwieni z układem TCRT5000. Może służyć do detekcji obiektów w małej odległości lub wykrywania linii w robotach typu "Line Follower".
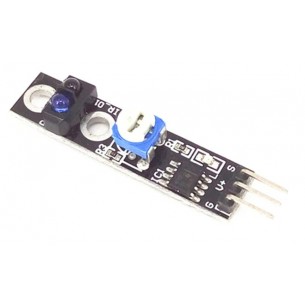
Moduł czujnika podczerwieni z układem TCRT5000. Sensor jest transoptorem odbiciowym, który może zostać użyty do detekcji obiektów w małej odległości lub wykrywania linii w robotach typu "Line Follower", sprawdzi się również do detekcji krawędzi planszy lub stołu dla małych robotów. Moduł zawiera przerzutnik Schmitta, dzięki czemu użycie sensora ogranicza się do odczytywania stanu wyjścia, które informuje o stanie czujnika.
Cechy
Producent BTC Korporacja sp. z o. o. Lwowska 5 05-120 Legionowo Polska sprzedaz@kamami.pl 22 767 36 20
Osoba odpowiedzialna BTC Korporacja sp. z o. o. Lwowska 5 05-120 Legionowo Polska sprzedaz@kamami.pl 22 767 36 20
Zestaw 10 szt. przewodów połączeniowych niebieskich żeńsko-żeńskich o długości 25 cm. CAB_F-F(10-25-B)
Zestaw 10 szt. przewodów połączeniowych zielonych żeńsko-żeńskich o długości 25 cm.. CAB_F-F(10-25-R)
Zestaw 10 szt. przewodów połączeniowych czarnych żeńsko-żeńskich o długości 21 cm. CAB_F-F(10-25-BK)
Brak towaru
Zestaw 10 szt. przewodów połączeniowych żeńsko-żeńskich, w różnych kolorach o długości 17 cm. CAB_F-F(10-17-Rainbow)
Brak towaru
Moduł czujnika podczerwieni z układem TCRT5000. Może służyć do detekcji obiektów w małej odległości lub wykrywania linii, dzięki potencjometrowi można dostosować próg wykrywania
Brak towaru
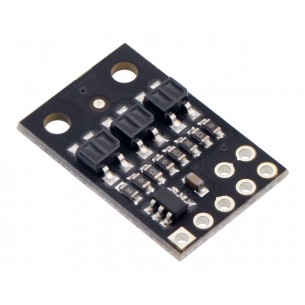
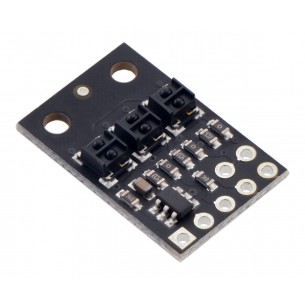
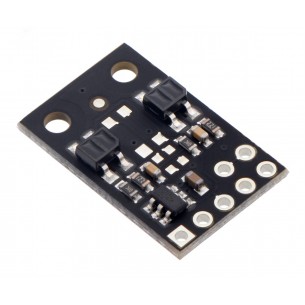
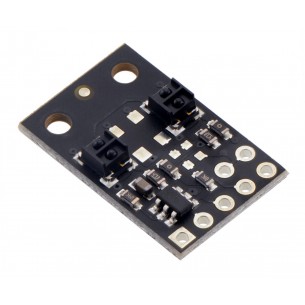
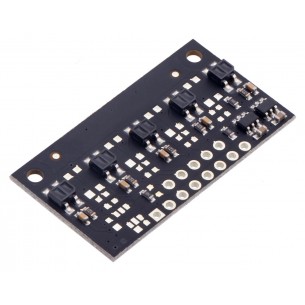
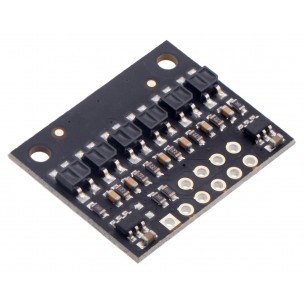
Moduł z 3 transoptorami typu QTR z wyjściem analogowym. Moduł zasilany napięciem 2,9 - 5,5V, wykrywa obiekty w odległości do 30 mm. Czujnik znajdzie zastosowanie w projektach wymagających wykrywania zmian w podłożu, np. w robotach typu linefollower. Pololu 4203
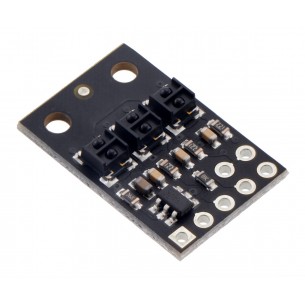
Moduł z 3 transoptorem typu QTRX z wyjściem RC (cyfrowym). Moduł zasilany napięciem 2,9 - 5,5V, wykrywa obiekty w odległości do 30 mm. Czujnik znajdzie zastosowanie w projektach wymagających wykrywania zmian w podłożu, np. w robotach typu linefollower. Pololu 4303
Moduł z 3 transoptorem typu QTRX z wyjściem analogowym. Moduł zasilany napięciem 2,9 - 5,5V, wykrywa obiekty w odległości do 30 mm. Czujnik znajdzie zastosowanie w projektach wymagających wykrywania zmian w podłożu, np. w robotach typu linefollower. Pololu 4403
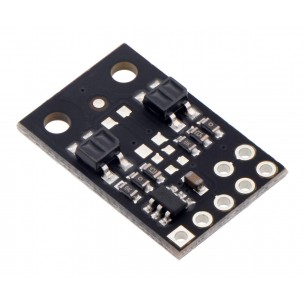
Moduł z 2 transoptorami typu QTR z wyjściem RC (cyfrowym). Moduł zasilany napięciem 2,9 - 5,5V, wykrywa obiekty w odległości do 30 mm. Czujnik znajdzie zastosowanie w projektach wymagających wykrywania zmian w podłożu, np. w robotach typu linefollower. Pololu 4142
Moduł z 2 transoptorami typu QTR z wyjściem analogowym. Moduł zasilany napięciem 2,9 - 5,5V, wykrywa obiekty w odległości do 30 mm. Czujnik znajdzie zastosowanie w projektach wymagających wykrywania zmian w podłożu, np. w robotach typu linefollower. Pololu 4242
Moduł z 2 transoptorem typu QTRX z wyjściem RC (cyfrowym). Moduł zasilany napięciem 2,9 - 5,5V, wykrywa obiekty w odległości do 30 mm. Czujnik znajdzie zastosowanie w projektach wymagających wykrywania zmian w podłożu, np. w robotach typu linefollower. Pololu 4342
Moduł z 2 transoptorem typu QTRX z wyjściem analogowym. Moduł zasilany napięciem 2,9 - 5,5V, wykrywa obiekty w odległości do 30 mm. Czujnik znajdzie zastosowanie w projektach wymagających wykrywania zmian w podłożu, np. w robotach typu linefollower. Pololu 4442
Brak towaru
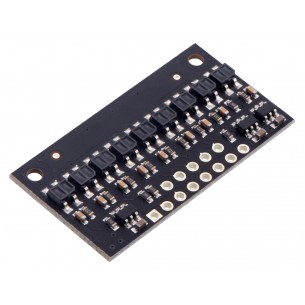
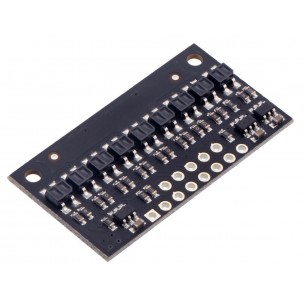
Moduł z 9 transoptorami typu QTR z wyjściem RC (cyfrowym). Moduł zasilany napięciem 2,9 - 5,5V, wykrywa obiekty w odległości do 40 mm. Czujnik znajdzie zastosowanie w projektach wymagających wykrywania zmian w podłożu, np. w robotach typu linefollower. Pololu 4109
Moduł z 9 transoptorami typu QTR z wyjściem analogowym. Moduł zasilany napięciem 2,9 - 5,5V, wykrywa obiekty w odległości do 40 mm. Czujnik znajdzie zastosowanie w projektach wymagających wykrywania zmian w podłożu, np. w robotach typu linefollower. Pololu 4209
Moduł z 9 transoptorem typu QTRX z wyjściem RC (cyfrowym). Moduł zasilany napięciem 2,9 - 5,5V, wykrywa obiekty w odległości do 40 mm. Czujnik znajdzie zastosowanie w projektach wymagających wykrywania zmian w podłożu, np. w robotach typu linefollower. Pololu 4309
Moduł z 9 transoptorem typu QTRX z wyjściem analogowym. Moduł zasilany napięciem 2,9 - 5,5V, wykrywa obiekty w odległości do 40 mm. Czujnik znajdzie zastosowanie w projektach wymagających wykrywania zmian w podłożu, np. w robotach typu linefollower. Pololu 4409
Brak towaru
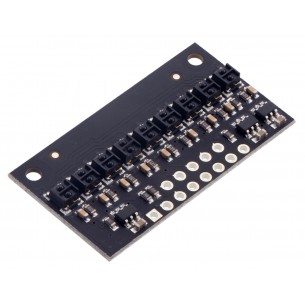
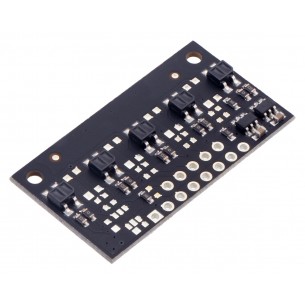
Moduł z 5 transoptorami typu QTR z wyjściem RC (cyfrowym). Moduł zasilany napięciem 2,9 - 5,5V, wykrywa obiekty w odległości do 40 mm. Czujnik znajdzie zastosowanie w projektach wymagających wykrywania zmian w podłożu, np. w robotach typu linefollower. Pololu 4145
Brak towaru
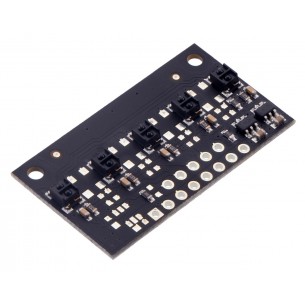
Moduł z 5 transoptorami typu QTR z wyjściem analogowym. Moduł zasilany napięciem 2,9 - 5,5V, wykrywa obiekty w odległości do 40 mm. Czujnik znajdzie zastosowanie w projektach wymagających wykrywania zmian w podłożu, np. w robotach typu linefollower. Pololu 4245
Moduł z 5 transoptorem typu QTRX z wyjściem RC (cyfrowym). Moduł zasilany napięciem 2,9 - 5,5V, wykrywa obiekty w odległości do 40 mm. Czujnik znajdzie zastosowanie w projektach wymagających wykrywania zmian w podłożu, np. w robotach typu linefollower. Pololu 4345
Moduł z 5 transoptorem typu QTRX z wyjściem analogowym. Moduł zasilany napięciem 2,9 - 5,5V, wykrywa obiekty w odległości do 40 mm. Czujnik znajdzie zastosowanie w projektach wymagających wykrywania zmian w podłożu, np. w robotach typu linefollower. Pololu 4445
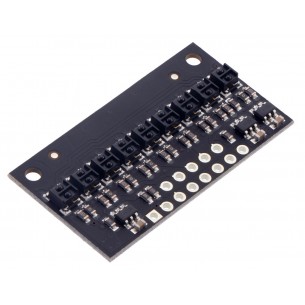
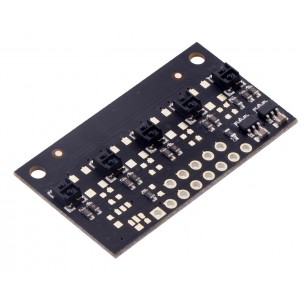
Moduł z 6 transoptorami typu QTR z wyjściem RC (cyfrowym). Moduł zasilany napięciem 2,9 - 5,5V, wykrywa obiekty w odległości do 40 mm. Czujnik znajdzie zastosowanie w projektach wymagających wykrywania zmian w podłożu, np. w robotach typu linefollower. Pololu 4106
Moduł czujnika podczerwieni z układem TCRT5000. Może służyć do detekcji obiektów w małej odległości lub wykrywania linii w robotach typu "Line Follower".