50,79 zł Netto
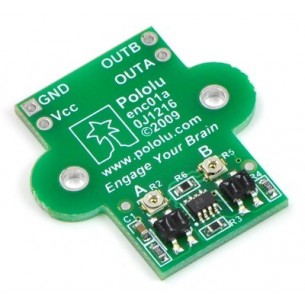
Enkoder zapewnia precyzyjny pomiar prędkości i kierunku obrotu w małych robotach mobilnych, szczególnie w konstrukcjach z napędem różnicowym. Niewielkie wymiary i wysoka rozdzielczość czynią go odpowiednim rozwiązaniem do projektów wymagających dokładnej odometrii. Pololu 1217
Enkoder kwadraturowy przeznaczony do współpracy z mikrosilnikami metalowymi Pololu, kołem 42×19 mm oraz wydłużonym uchwytem silnika. Układ umożliwia pomiar prędkości i kierunku obrotu koła, wykorzystując dwa czujniki odbiciowe IR umieszczone w piaście koła. Sygnały są przesunięte w fazie o około 90°, co pozwala na jednoznaczne określenie kierunku obrotu i uzyskanie wysokiej rozdzielczości pomiaru.
Producent BTC Korporacja sp. z o. o. Lwowska 5 05-120 Legionowo Polska sprzedaz@kamami.pl 22 767 36 20
Osoba odpowiedzialna BTC Korporacja sp. z o. o. Lwowska 5 05-120 Legionowo Polska sprzedaz@kamami.pl 22 767 36 20
Zestaw dwóch kół Pololu o wymiarach 43x19mm w kolorze białym. Pasują do wału w kształcie litery D o średnicy 3 mm. Pololu 1090
Zestaw dwóch plastikowych uchwytów w kolorze białym do montażu miniaturowych silników Pololu. W zestawie śrubki montażowe i nakrętki. Wersja przedłużona. Pololu 1089
Enkoder zapewnia precyzyjny pomiar prędkości i kierunku obrotu w małych robotach mobilnych, szczególnie w konstrukcjach z napędem różnicowym. Niewielkie wymiary i wysoka rozdzielczość czynią go odpowiednim rozwiązaniem do projektów wymagających dokładnej odometrii. Pololu 1217
Moduł enkodera kompatybilny z obudową 2wd miniQ Robot. Wyjście typu AB, generowane jest dwoma czujnikami odbiciowymi. DFRobot SEN0116
Zestaw enkoderów przeznaczonych do montażu w podwoziach 3PA oraz 4WD. DFRobot SEN0038
W zestawie są dwa komplety enkoderów dla robota RedBot. Każdy zestaw zawiera kółko enkodera, czujnik Halla oraz elementy montażowe. ROB-12629
Brak towaru
Para enkoderów z dokładnością 12 CPR, działająca z napięciem 2,7 - 18 V i zgodna z silnikami HPCB. Pololu 3081
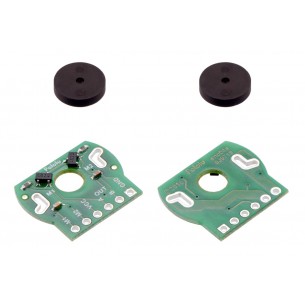
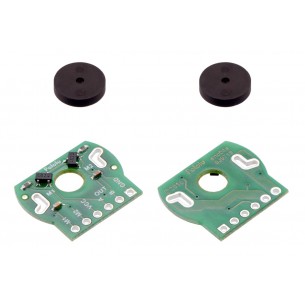
Zestaw dwóch magnetycznych enkoderów kwadraturowych do silników mini Pololu z przedłużonym wałem, zasilanie 2,7-18V. Pololu 1523
Zestaw enkoderów magnetycznych, przeznaczonych dla podwozia Romi Chassis. Z ich pomocą możemy mierzyć dystans przejechany przez naszego robota mobilnego lub kontrolować prędkość obrotową silników. Pololu 3542
Brak towaru
Dysk magnetyczny do użycia z enkoderami magnetycznymi przeznaczonymi dla silników Pololu z serii 20D. Pololu 3498
Zestaw dwóch enkoderów magnetycznych do użycia z silnikami Pololu z serii 20D. Maksymalna rozdzielczość to 20 impulsów na jeden obrót wału silnika. Zasilane napięciem 2,7-18V. Pololu 3499
Zestaw dysków magnetycznych do użycia z enkoderami magnetycznymi przeznaczonymi dla silników mini (z plastikową przekładnią) oraz przedłużonym wałem firmy Pololu. Pololu 1524
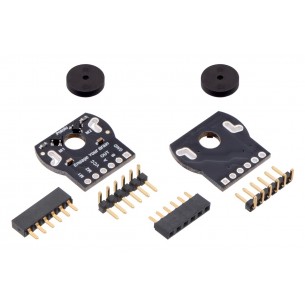
Zestaw dwóch optycznych enkoderów kwadraturowych do mikrosilników Pololu z obustronnym przedłużonym wałem, kompatybilne z silnikami z serii LP, MP, oraz HP, zasilanie 5V. Pololu 2590
Brak towaru
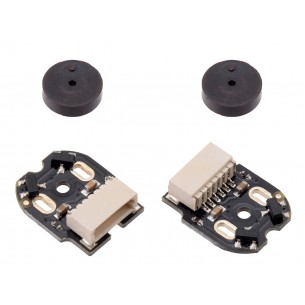
Zestaw dwóch enkoderów magnetycznych do użycia z silnikami Pololu DC Micro. Maksymalna rozdzielczość to 12 impulsów na jeden obrót wału silnika. Zasilane napięciem od 2,7V do 18V. Pololu 4761
Brak towaru
Zestaw dwóch enkoderów magnetycznych do użycia z silnikami Pololu DC Micro. Maksymalna rozdzielczość to 12 impulsów na jeden obrót wału silnika. Zasilane napięciem od 2,7V do 18V. Pololu 4760
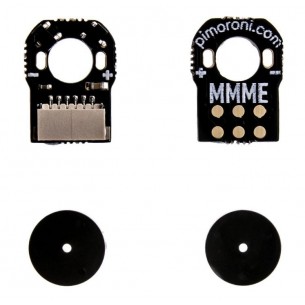
Zestaw dwóch enkoderów magnetycznych do użycia z silnikami micro. Montaż prosty, w zestawie 2 sztuki. Pimoroni PIM604
Zestaw dwóch enkoderów magnetycznych do użycia z silnikami micro. Montaż boczny, w zestawie 2 sztuki. Pimoroni PIM605
Dysk magnetyczny do użycia z enkoderami magnetycznymi przeznaczonymi dla silników Pololu z serii 20D. Pozwala generować 12 impulsów na obrót. Pololu 3449
Enkoder zapewnia precyzyjny pomiar prędkości i kierunku obrotu w małych robotach mobilnych, szczególnie w konstrukcjach z napędem różnicowym. Niewielkie wymiary i wysoka rozdzielczość czynią go odpowiednim rozwiązaniem do projektów wymagających dokładnej odometrii. Pololu 1217