















3 088,60 zł Netto
Zestaw do budowy autonomicznego robota wyścigowego w oparciu o NVIDIA Jetson Nano B01. Waveshare JetRacer ROS AI Kit A

darmowa wysyłka na terenie Polski dla wszystkich zamówień powyżej 500 PLN

Jeśli Twoja wpłata zostanie zaksięgowana na naszym koncie do godz. 11:00

Każdy konsument może zwrócić zakupiony towar w ciągu 14 dni bez zbędnych pytań
Zestaw do budowy autonomicznego robota wyścigowego w oparciu o NVIDIA Jetson Nano B01. Składa się z podwozia wyścigowego, kamery 8MP z sensorem Sony IMX219, modułu komunikacji bezprzewodowej WiFi Dual-Band 2,4/5 GHz, czujników IMU, skanera laserowego oraz niezbędnych akcesoriów.
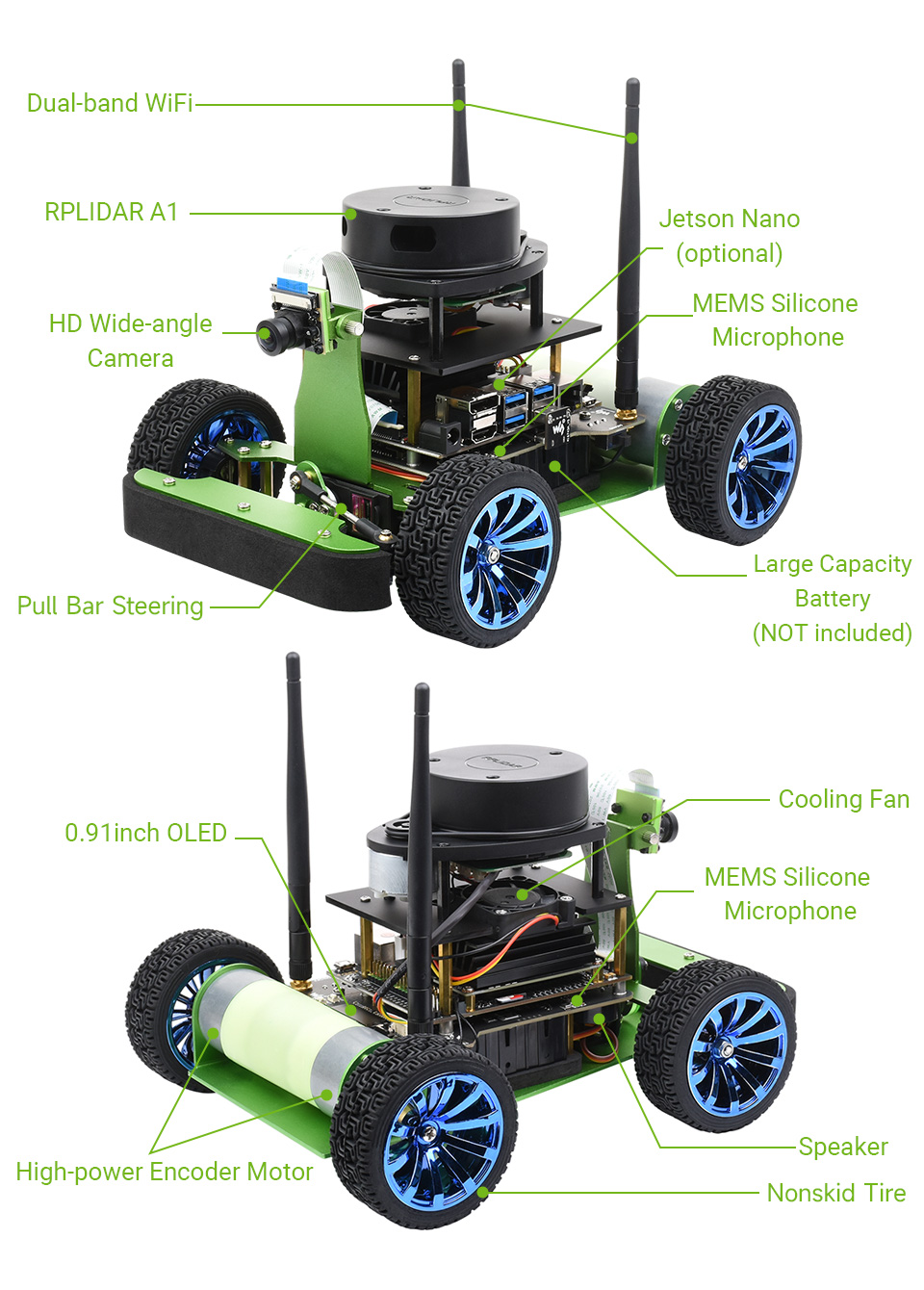
Podwozie to konstrukcja oparta o zasadę Ackermana z silnikiem napędowym 37-520 o prędkości 333 obr./min oraz przednią osią skrętną z serwomechanizmem. Silnik ma wytrzymałą, metalową przekładnię, a podwozie wykorzystuje podwójną blokadę mechanizmu różnicowego. Szkielet wykonany został z wysokiej jakości włókna węglowego. Dodatkowym elementem układu napędowego są enkodery inkrementalne z czujnikami Halla, które zapewniają informację zwrotną niezbędną do realizacji algorytmów stosowanych w odometrii.

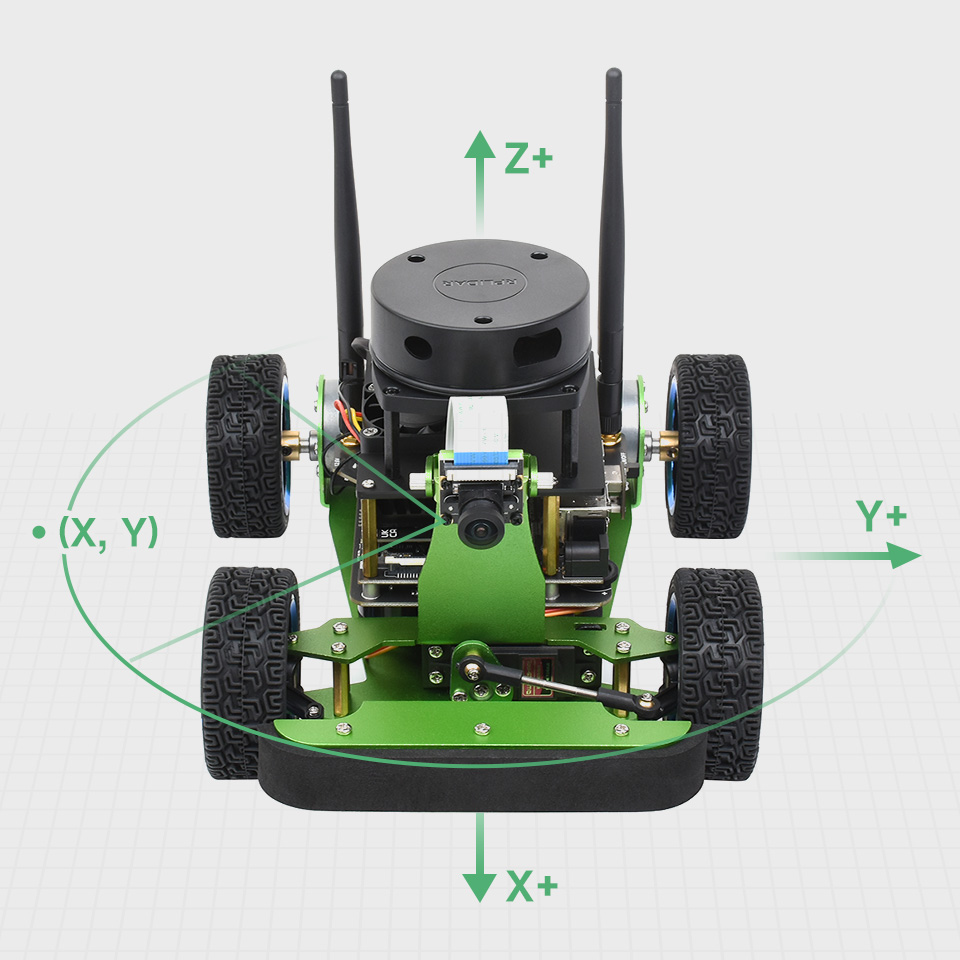
Zestaw oferuje bogate wyposażenie w postaci czujników. Skaner laserowy RPLidar o zasięgu 12 m umożliwia skanowanie 360-stopni w celu uzyskania mapy konturowej wokół robota, a wbudowany 9-osiowy czujnik położenia, wykorzystujący rozszerzony filtr Kalmana do połączenia danych z czujnikami odometrii, pozwala określić precyzyjnie położenie robota.
 |
 |
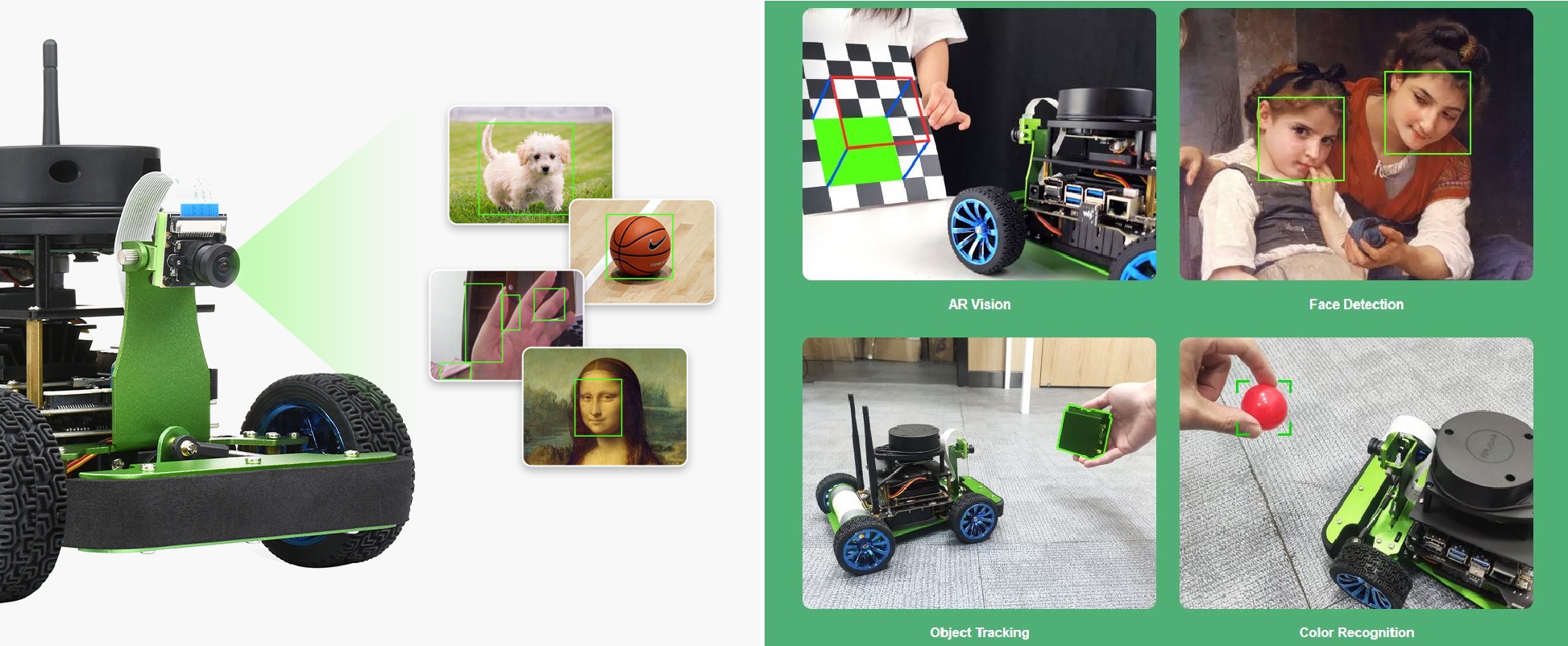
Za przetwarzanie obrazu odpowiada kamera z sensorem MX219 o rozdzielczość 3280x2464 piksel, która idealnie pasuje do rozwoju algorytmów wizji z pakietem OpenCV takich, jak rozpoznawania obiektów, śledzenie celów oraz autonomicznej jazdy.
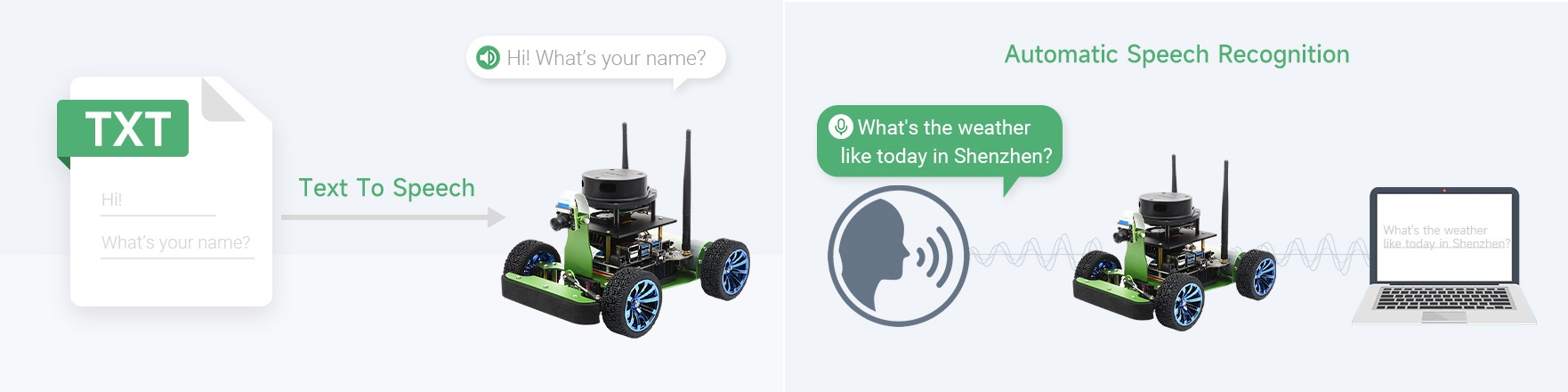
Robot oferuje również możliwość rozpoznawania mowy i sterowania głosowego oraz generowania dźwięków. Do tego celu wykorzystuje dwa wysokiej jakości mikrofony MEMS i głośnik do odtwarzania w stereo. Wspiera algorytmy syntezy, wykrywania i rozpoznawania mowy, które pozwalają na interakcję człowiek-robot. Oprogramowanie ma możliwość wykrywania strumienia audio i usuwania części wyciszonej, dzięki czemu robot odbiera tylko tę część, którą mówi użytkownik. Poza tym oferuje możliwość przetwarzania tekstu i mowy w obie strony (text-to-speech oraz speech-to-text). Może współpracować z Google Assistant w języku angielskim oraz IFLYTEK w języku chińskim.

Robot sterowany jest za pomocą zestawu rozwojowego NVIDIA z układem CPU ARM Cortex A57 pracującego z częstotliwością 1,43 GHz. Wyposażony jest w układ graficzny Maxwell składający się z 128 rdzeni wspierający technologię CUDA. Układ ma pamięć RAM DDR4 o pojemności 4 GB, interfejs Ethernet oraz HDMI i dwa złącza MIPI-CSI. Pakiet przeznaczony jest do projektowania grafiki oraz przetwarzania bardzo dużych ilości danych. Pozwala zapoznać się z techniką programowania procesorów graficznych.
Moduł Jetson Nano to najmniejsze urządzenie platformy Jetson. Zapewnia wydajność do uruchamiania nowoczesnych obciążeń AI w małym, energooszczędnym formacie. Udostępnia 472 GFLOPs mocy obliczeniowej na potrzeby szybkiej pracy z algorytmami nowoczesnej SI. Może równolegle uruchomić wiele sieci neuronowych i jednocześnie przetwarzać dane z wielu czujników o wysokiej rozdzielczości, co czyni z niego doskonałe rozwiązanie jako sterownik w robotyce.

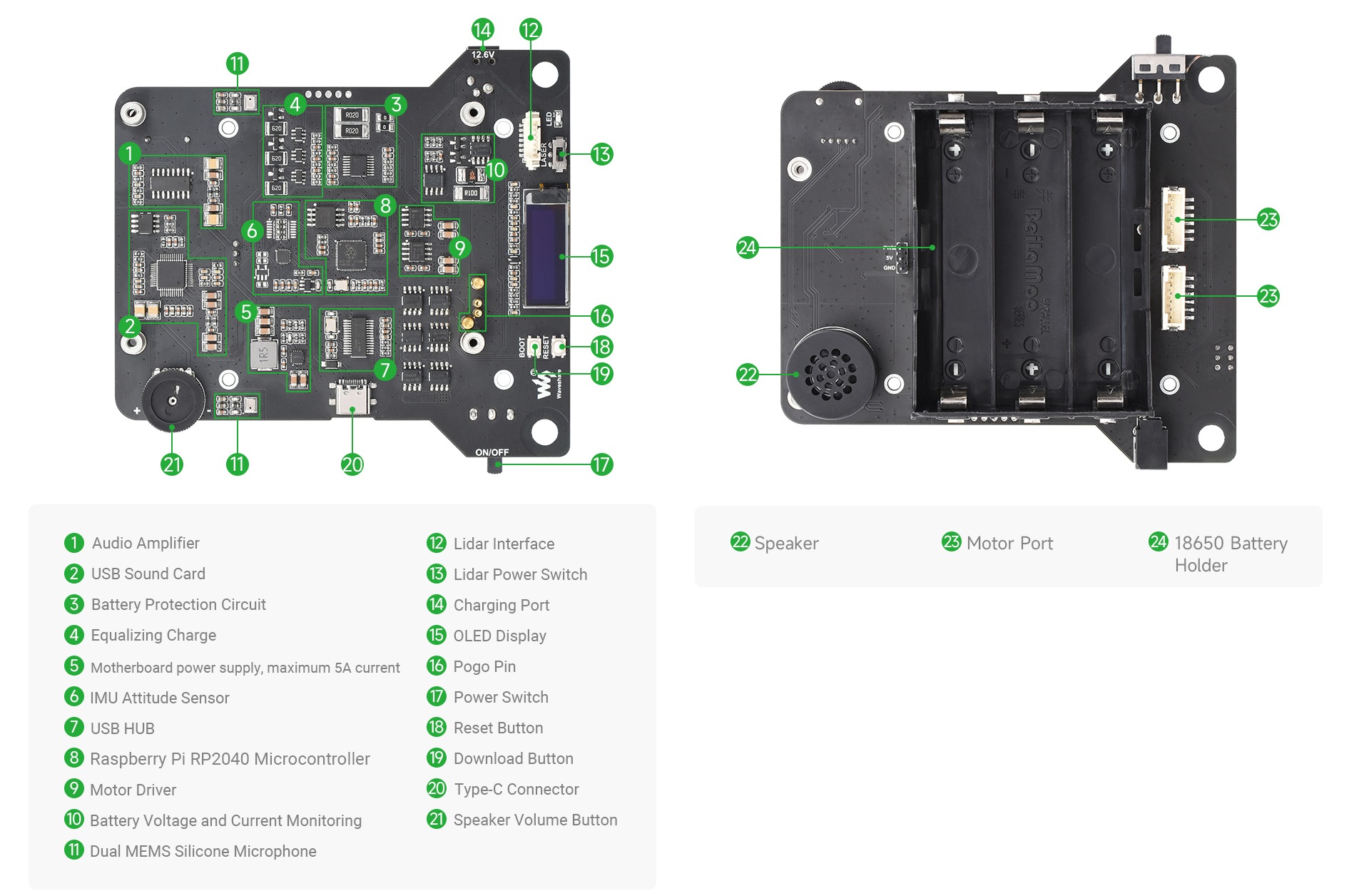
Na płytce rozszerzającej robota znalazł się sterownik silnika, wyświetlacz OLED, obwód ładowania i monitorowania stanu baterii oraz koszyk na 3 ogniwa akumulatorów 18650. Użytkownik znajdzie również wzmacniacz audio, kartę audio USB, czujniki IMU oraz mikrofony MEMS. Modułem struje dwurdzeniowy mikrokontroler Raspberry Pi RP2040, który charakteryzuje się lepszą wydajnością w czasie rzeczywistym i większą dokładnością sterowania, a odpowiada za zbieranie danych i sterowanie ruchem.
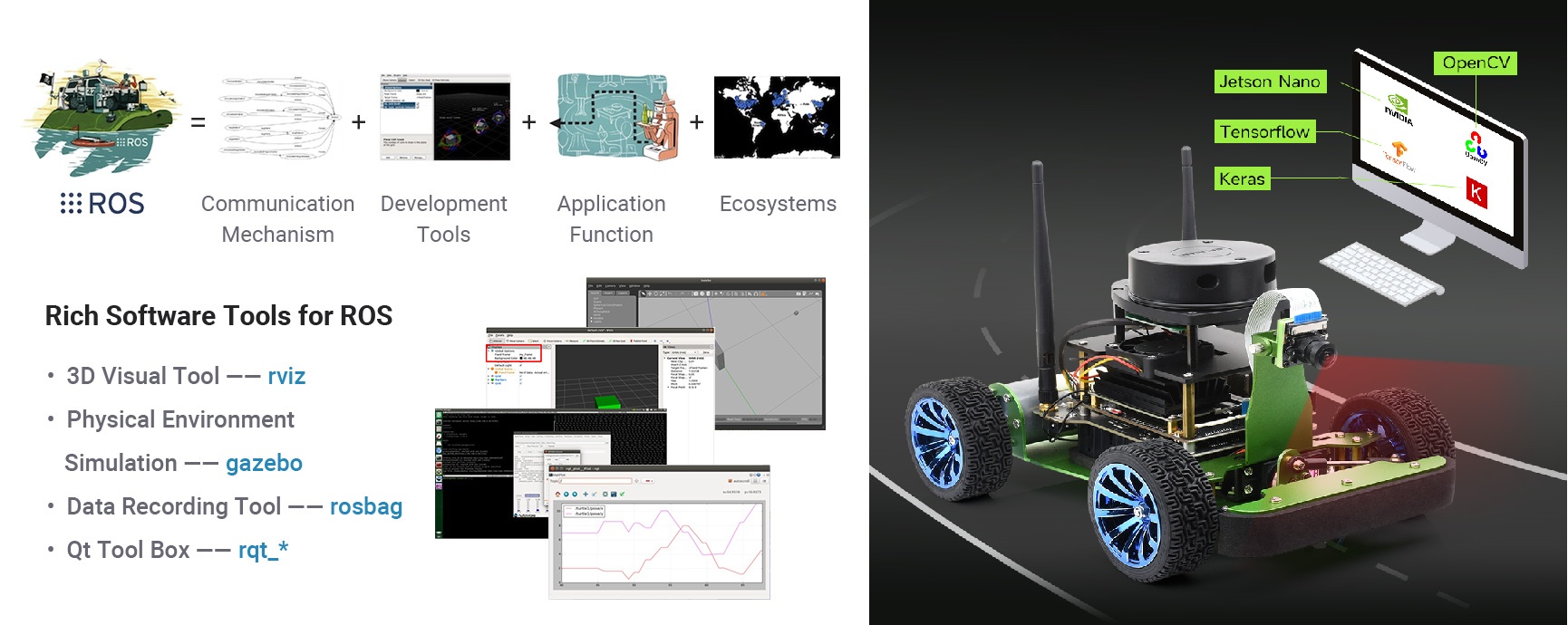
Robot jest wspierany przez bogate oprogramowanie, w tym ROS, czyli system operacyjny typu open-source, który zawiera zbiór bibliotek oprogramowania i narzędzi do projektowania robotów. Dzięki DonKeyCar wykorzystuje framework Keras/TensorFlow do uczenia głębokiego wraz z biblioteką wizji komputerowej OpenCV, aby osiągnąć jak najwyższy stopień autonomii jazdy, natomiast bogaty zestaw czujników w połączeniu z filtrem Kalmana (EKF) daje możliwość implementacji algorytmów SLAM.
Producent udostępnia użytkownikom liczne przykłady i bogatą dokumentację, która pozwala w łatwy sposób rozpocząć pracę z zestawem. Więcej informacji oraz materiałów można znaleźć na stronie produktu.
Uwaga!
Zestaw nie zawiera akumulatorów (pasują akumulatory 18650 krótsze niż 67 mm).
Zestaw akcesoriów do budowy autonomicznego robota wyścigowego w oparciu o popularny zestaw deweloperski NVIDIA Jetson Nano. Waveshare JetRacer Pro AI Kit Acce
Zestaw akcesoriów do budowy autonomicznego robota wyścigowego w oparciu o popularny zestaw deweloperski NVIDIA Jetson Nano. Waveshare JetRacer AI Kit Acce
Zestaw akcesoriów do budowy autonomicznego robota wyścigowego w oparciu o popularny zestaw deweloperski NVIDIA Jetson Nano. Waveshare JetRacer Pro 2GB AI Kit Acce
Brak towaru
Zestaw akcesoriów do budowy autonomicznego robota wyścigowego w oparciu o popularny zestaw deweloperski NVIDIA Jetson Nano. Waveshare JetRacer 2GB AI Kit Acce
Brak towaru
Zestaw akcesoriów do budowy autonomicznego robota wyścigowego w oparciu NVIDIA Jetson Nano. Waveshare JetRacer ROS AI Kit Acce
Brak towaru
Zestaw do budowy autonomicznego robota wyścigowego w oparciu o NVIDIA Jetson Nano Dev Kit. Waveshare JetRacer ROS AI Kit B
Silnik o średnicy 37 mm i długości 68 mm, z metalową przekładnią 30:1, napięciem pracy 24 V, poborem prądu od 0,1 A do 3 A, prędkością 330 RPM, maksymalnym momentem obrotowym 15 kg*cm i enkoderem magnetycznym 64 CPR. Pololu 4692
Brak towaru
Sterownik silnika wibracyjnego z obsługą rożnych efektów wibracji. Do komunikacji wykorzystuje interfejs I2C wyprowadzony na złącza Stemma QT oraz goldpin. Jest zgodny z silnikami LRA oraz ERM. Adafruit 2305
Brak towaru
Silnik o średnicy 20 mm i długości 43 mm, z metalową przekładnią 78:1, napięciem pracy 12 V, poborem prądu od 0,08 A do 1,6 A, prędkością 180 RPM, maksymalnym momentem obrotowym 5,4 kg*cm, obustronnym wałem i węglowymi szczotkami o zwiększonej wytrzymałości. Pololu 3489
Brak towaru
Solarbotics RW2i Wheel (internal set screw)
Silnik o średnicy 20 mm i długości 44 mm, z metalową przekładnią 125:1, napięciem pracy 12 V, poborem prądu od 0,08 A do 1,6 A, prędkością 110 RPM, maksymalnym momentem obrotowym 7,8 kg*cm, obustronnym wałem i węglowymi szczotkami o zwiększonej wytrzymałości. Pololu 3491
Brak towaru
Niewielki silnik dużej mocy z metalową przekładnią 10:1, napięciem pracy 6 V, poborem prądu od 0,07 A do 1,6 A, prędkością 3100 RPM i maksymalnym momentem obrotowym 0,22 kg*cm. Pololu 999
Brak towaru
High-Traction Sticky Tire (one tire)
Silnik o średnicy 25 mm i długości 52 mm, z metalową przekładnią 34:1, napięciem pracy 12 V, poborem prądu od 0,1 A do 1,1 A, prędkością 150 RPM i maksymalnym momentem obrotowym 3 kg*cm. Pololu 3252
Brak towaru
Nieduży silnik z metalową przekładnią ślimakową, prędkość obrotowa 136 RPM, napięcie pracy 12 V. GA1218-N20W-0040
Robot minisumo na podwoziu gąsienicowym z silnikami Pololu z przekładnią 50:1 HP. Robot w pełni złożony, wymaga dodatkowo czterech baterii AA. Pololu 4991
Brak towaru
Silnik o średnicy 37 mm i długości 76,5 mm, z przekładnią 56:1, napięciem pracy 12 V, poborem prądu od 1,1 A do 6 A, prędkością 260 RPM i maksymalnym momentem obrotowym 19 kg*cm. JGB37-550
Brak towaru
Złożone podwozie robota gąsienicowego, wyposażone w dwa silniki DC. Stanowi znakomitą bazę do budowy pojazdów zdalnie sterowanych. Może zostać wyposażony w dodatkowe czujniki czy elementy wykonawcze np. ramię robotyczne. W zestawie znajduje się również plastikowa obudowa (widoczna na drugim zdjęciu)
Kontroler przeznaczony do robota Pololu 3pi+ 2040. Został oparty o mikrokontroler Raspberry Pi RP2040 oraz wyposażony jest w zestaw czujników. Wersja do użytku z wyświetlaczem OLED. Pololu 5006
Brak towaru
Silnik o średnicy 20 mm i długości 46 mm, z metalową przekładnią 250:1, napięciem pracy 6 V, poborem prądu od 0,15 A do 2,9 A, prędkością 57 RPM, maksymalnym momentem obrotowym 12 kg*cm, obustronnym wałem i węglowymi szczotkami o zwiększonej wytrzymałości. Pololu 3720
Brak towaru
Niewielki silnik małej mocy z metalową przekładnią 100:1, napięciem pracy 6 V, poborem prądu od 0,02 A do 0,36 A, prędkością 130 RPM, maksymalnym momentem obrotowym 0,74 kg*cm i obustronnym wałem. Pololu 2204
Zestaw do budowy autonomicznego robota wyścigowego w oparciu o NVIDIA Jetson Nano B01. Waveshare JetRacer ROS AI Kit A