















50,33 zł Netto
KAmod Motor Driver to zaawansowany sterownik silnika DC zasilany napięciem 6-30 V, umożliwiający regulację mocy metodą PWM oraz kontrolę kierunku obrotów, kompatybilny z sygnałami analogowymi i PWM z różnych źródeł, wyposażony w zabezpieczenia przeciążeniowe i termiczne oraz funkcje łagodnego startu i zatrzymania
KAmod Motor Driver jest sterownikiem silnika elektrycznego na napięcie stałe do 30 V. Umożliwia wybór kierunku obrotów silnika oraz regulację jego mocy w zakresie 0...100%, co w praktyce służy do regulacji prędkości obrotowej. Sygnałem sterującym może być sygnał napięciowy mieszczący się w jednym z 3 zakresów: 0...3,3 V, 0...5 V lub 0...10 V, lub sygnał PWM o amplitudzie 3,3 V, 5 V lub 10 V. Takie sygnały można łatwo uzyskać z płytek Raspberry, Arduino, Nucleo lub ze zwykłego potencjometru. Stopień mocy jest zbudowany z tranzystorów MOSFET połączonych w układzie mostka H, co zapewnia wysoką moc wyjściową i wysoką sprawność sterownika.
Producent BTC Korporacja sp. z o. o. Lwowska 5 05-120 Legionowo Polska sprzedaz@kamami.pl 22 767 36 20
Osoba odpowiedzialna BTC Korporacja sp. z o. o. Lwowska 5 05-120 Legionowo Polska sprzedaz@kamami.pl 22 767 36 20
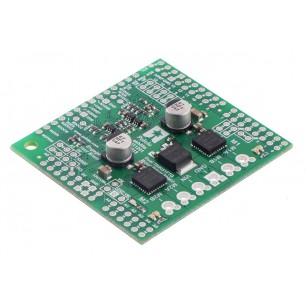
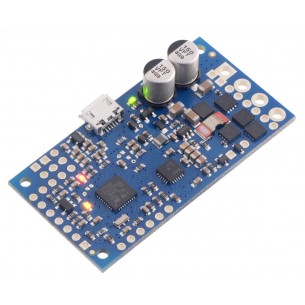
Sterownik silnika prądu stałego (DC) o napięciu pracy 6,5-30V i maksymalnym prądzie ciągłym 27A. Posiada możliwość łatwej realizacji pętli sprzężenia zwrotnego oraz liczne interfejsy sterujące. Pololu 3148
Brak towaru
Sterownik silnika prądu stałego (DC) o napięciu pracy 6,5-40V i maksymalnym prądzie ciągłym 21A. Posiada możliwość łatwej realizacji pętli sprzężenia zwrotnego oraz liczne interfejsy sterujące. Pololu 3149
Brak towaru
Sterownik umożliwia zasilanie silników napięciem w zakresie 10-47V i poborze prądu przy pracy ciągłej 1,7A (4,5A w szczycie) dla każdego z kanałów w trybie dual lub 3,4A (9A w szczycie) w trybie jednego kanału. Pololu 2999
TB9051FTG Single Brushed DC Motor Driver Carrier to pojedynczy sterownik silników DC, który umożliwia zasilanie silnika napięciem w zakresie 4,5...28V i poborze prądu przy pracy ciągłej 2,6A (5A w szczycie). Pololu 2997
Moduł sterownika silników DC z dwoma kanałami, dedykowany do stosowania w modelarstwie. Może być sterowany za pomocą nadajnika RC i wykorzystuje sygnał PPM. DFRobot DFR0513
Moduł rozszerzeń przeznaczony do współpracy z micro:bit. Pozwala na sterownie 4 silnikami DC lub dwoma silnikami krokowymi i 8 serwami. Komunikuje się przez interfejs I2C. DFRobot DFR0548
Podwójny sterownik silników DC przeznaczony dla Arduino, który umożliwia zasilanie silnika napięciem w zakresie 4,5-28V i poborze prądu przy pracy ciągłej 2,6A (5A w szczycie) dwóch silników DC. Pololu 2520
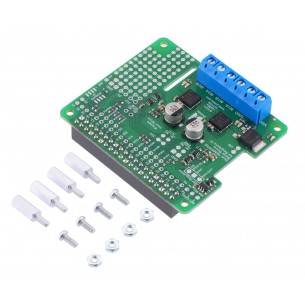
Podwójny sterownik silników DC przeznaczony dla Raspberry Pi, który umożliwia zasilanie silnika napięciem w zakresie 4,5-28V i poborze prądu przy pracy ciągłej 2,6A (5A w szczycie) dwóch silników DC. Pololu 2762
Podwójny sterownik silników DC przeznaczony dla Raspberry Pi, który umożliwia zasilanie silnika napięciem w zakresie 4,5-28V i poborze prądu przy pracy ciągłej 2,6A (5A w szczycie) dwóch silników DC. Zestaw do samodzielnego montażu. Pololu 2761
Sterownik silnika prądu stałego (DC) o napięciu pracy 4,5..28V i maksymalnym prądzie ciągłym 2,6A. Posiada możliwość łatwej realizacji pętli sprzężenia zwrotnego oraz liczne interfejsy sterujące. Pololu 3143
Brak towaru
Sterownik silnika prądu stałego (DC) o napięciu pracy 4,5-28V i maksymalnym prądzie ciągłym 2,6A. Posiada możliwość łatwej realizacji pętli sprzężenia zwrotnego oraz liczne interfejsy sterujące. Pololu 3142
Brak towaru
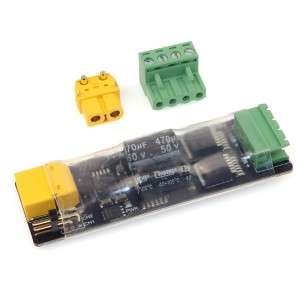
Dwukierunkowy kontroler prędkości ESC do silników szczotkowych. Może dostarczyć prąd o natężeniu 20 A i ma przewody zakończone złączem XT60. DFRobot DRI0047
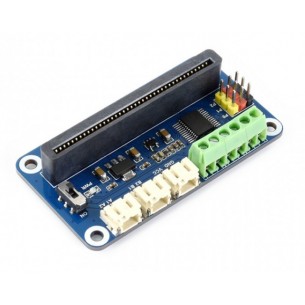
Nakładka ze sterownikiem silników TB6612FNG oraz sterownikiem PWM PCA9685 przeznaczona do minikomputerów Raspberry Pi. Płytka wyposażona została w złącze 40-pin charakterystyczne dla Raspberry Pi. Waveshare Motor Driver HAT
Moduł rozszerzeń przeznaczony do współpracy z płytką edukacyjną micro:bit. Może sterować 3 serwomechanizmami i 2 silnikami prądu stałego. Waveshare Motor Driver for micro:bit
Brak towaru
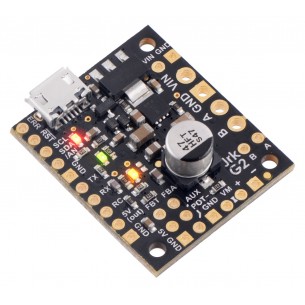
Pololu G2 18v15 High Power to miniaturowy sterownik silnika DC. Zasilanie sterownika: 6,5...30 V. Wydajność prądowa modułu: 15 A. Moduł posiada zabezpieczenie przed napięciem wstecznym i przepięciami. Pololu 1362
Brak towaru
Pololu G2 18v15 High Power to miniaturowy sterownik silnika DC. Zasilanie sterownika: 6,5...30 V. Wydajność prądowa modułu: 15 A. Moduł posiada zabezpieczenie przed napięciem wstecznym i przepięciami. Pololu 1363
KAmod Motor Driver to zaawansowany sterownik silnika DC zasilany napięciem 6-30 V, umożliwiający regulację mocy metodą PWM oraz kontrolę kierunku obrotów, kompatybilny z sygnałami analogowymi i PWM z różnych źródeł, wyposażony w zabezpieczenia przeciążeniowe i termiczne oraz funkcje łagodnego startu i zatrzymania