










428,58 zł Netto
Wysokoprądowy sterownik silnika DC z pomiarem prądu 36v20 CS Pololu umożliwia sterowanie silnikami DC o wysokim napięciu i dużym poborze prądu z jednoczesnym pomiarem obciążenia. Moduł sprawdza się w zaawansowanych projektach robotycznych i napędowych, gdzie wymagane są wysoka wydajność prądowa, elastyczne tryby sterowania oraz możliwość precyzyjnej kontroli prądu silnika.
Pololu High-Power Motor Driver 36v20 CS przeznaczony do dwukierunkowego sterowania jednym szczotkowym silnikiem prądu stałego o dużej mocy w systemach wysokonapięciowych. Moduł oparty na dyskretnym mostku H z tranzystorami MOSFET typu N obsługuje napięcie zasilania w zakresie 5,5–50 V, co umożliwia zastosowanie w instalacjach 24 V i 36 V. Kompaktowa płytka o wymiarach 1,8 × 1,2 cala zapewnia prąd ciągły do 20 A bez radiatora, a przy dodatkowym chłodzeniu do około 32 A.
Wersja CS (Current Sense) udostępnia analogowe wyjście pomiaru prądu silnika w zakresie ±30 A, co pozwala na bieżące monitorowanie obciążenia, realizację zabezpieczeń programowych oraz diagnostykę pracy napędu. Dodatkowe wejście sterujące umożliwia tryb swobodnego biegu (coast) obok standardowych trybów napędu i hamowania. Sterownik obsługuje tryby sign-magnitude oraz locked-antiphase i wymaga minimalnie dwóch linii sterujących, co ułatwia integrację z mikrokontrolerami.
Układ oferuje detekcję zwarć, spadków napięcia oraz przegrzania sygnalizowanych na wyjściach FF1 i FF2. Brak sprzętowych zabezpieczeń nadprądowych i temperaturowych wymaga stosowania odpowiedniego chłodzenia oraz kontroli prądu z wykorzystaniem wyjścia CS, szczególnie w aplikacjach pracujących blisko granic parametrów.
Cechy
Producent BTC Korporacja sp. z o. o. Lwowska 5 05-120 Legionowo Polska sprzedaz@kamami.pl 22 767 36 20
Osoba odpowiedzialna BTC Korporacja sp. z o. o. Lwowska 5 05-120 Legionowo Polska sprzedaz@kamami.pl 22 767 36 20
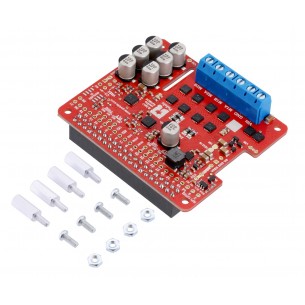
Pololu Dual G2 High-Power Motor Driver 24v14 to rozszerzenie pozwalające na sterowanie dwoma silnikami prądu stałego przeznaczone dla Raspberry Pi. Silniki mogą być zasilane napięciem 6,5-36V i pobierać maksymalnie prąd o natężeniu do 14A. Pololu 3752
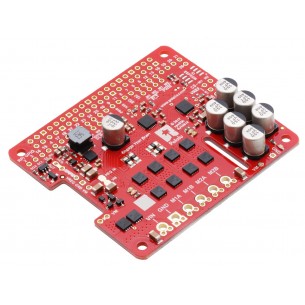
Moduł HAT ze sterownikiem dwóch silników prądu stałego przeznaczony dla Raspberry Pi. Silniki mogą być zasilane napięciem od 6,5 do 30 V i pobierać maksymalnie prąd o natężeniu do 18 A. Pololu 3751
Brak towaru
Pololu Dual G2 High-Power Motor Driver 18v18 to rozszerzenie pozwalające na sterowanie dwoma silnikami prądu stałego przeznaczone dla Raspberry Pi. Silniki mogą być zasilane napięciem 6,5-30V i pobierać maksymalnie prąd o natężeniu do 18A. Pololu 3750
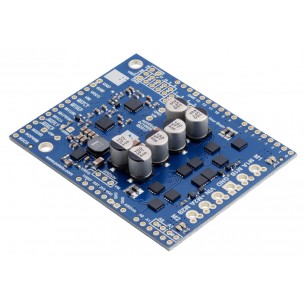
Pololu Dual G2 High-Power Motor Driver 18v18 to rozszerzenie pozwalające na sterowanie dwoma silnikami prądu stałego przeznaczone dla płytek Arduino. Silnik mogą być zasilane napięciem 6,5-30V i pobierać maksymalnie prąd o natężeniu do 18A. Pololu 2515
Pololu Dual G2 High-Power Motor Driver 18v22 to rozszerzenie pozwalające na sterowanie dwoma silnikami prądu stałego przeznaczone dla płytek Arduino. Silnik mogą być zasilane napięciem 6,5-30V i pobierać maksymalnie prąd o natężeniu do 22A. Pololu 2517
Brak towaru
Pololu Dual G2 High-Power Motor Driver 24v18 to rozszerzenie pozwalające na sterowanie dwoma silnikami prądu stałego przeznaczone dla Raspberry Pi. Silniki mogą być zasilane napięciem 6,5-36V i pobierać maksymalnie prąd o natężeniu do 18A. Pololu 3756
Brak towaru
Pololu Dual G2 High-Power Motor Driver 18v22 to rozszerzenie pozwalające na sterowanie dwoma silnikami prądu stałego przeznaczone dla Raspberry Pi. Silniki mogą być zasilane napięciem 6,5-30V i pobierać maksymalnie prąd o natężeniu do 22A. Pololu 3754
Brak towaru
Moduł sterownika silnika krokowego DRV8825 dla Arduino. Pozwala na sterowanie dwoma napędami, wyposażony w złącze XBee. DFRobot DRI0023
Sterownik silnika krokowego z układem MP6500 pozwala na zasilanie silnika bipolarnego prądem do 1,5A na fazę, bez użycia radiatora. Układ może być zasilany napięciem w zakresie 4,5-35V. Pololu 2966
Sterownik silnika krokowego z układem MP6500 pozwala na zasilanie silnika bipolarnego prądem do 1,8A na fazę, bez użycia radiatora. Układ może być zasilany napięciem w zakresie 4,5...35 V. Pololu 2968
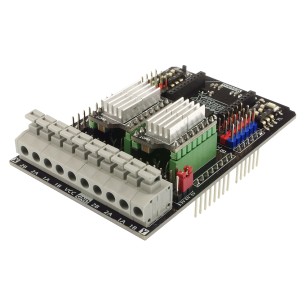
Gravity: IO Expansion & Motor Driver Shield to płytka rozszerzeń kompatybilna z Arduino, która udostępnia cyfrowe porty I/O, piny analogowe interfejsy I2C, SPI i UART, a także sterownik silników DC. DFRobot DFR0502
Tic T500 USB Multi-Interface Stepper Motor Controller to sterownik silnika krokowego oparty na układzie MP6500. Pozwala on sterować silnikiem krokowym, którego napięcie na cewkę wynosi 4,5...35V, maksymalny prąd na cewkę wynosi do 1,5A. Sterownikiem można sterować przy pomocy: USB, TTL, I2C, RC (PWM modelarski), wejściem analogowym czy enkodera kwadraturowego. Pololu 3135
Tic T500 USB to sterownik silnika krokowego oparty na układzie MP6500. Pozwala on sterować silnikiem krokowym, którego napięcie na cewkę wynosi 4,5-35V, maksymalny prąd na cewkę wynosi do 1,5A. Sterownikiem można sterować przy pomocy: USB, TTL, I2C, RC (PWM modelarski) itp. Pololu 3134
Sterownik silnika prądu stałego (DC) o napięciu pracy 6-34V i maksymalnym prądzie ciągłym 30A. Posiada możliwość łatwej realizacji pętli sprzężenia zwrotnego oraz liczne systemy bezpieczeństwa. Pololu 3290
Sterownik silnika prądu stałego (DC) o napięciu pracy 6...34V i maksymalnym prądzie ciągłym 60A. Posiada możliwość łatwej realizacji pętli sprzężenia zwrotnego oraz liczne systemy bezpieczeństwa. Pololu 3291
Brak towaru
2x1.2A DC Motor Driver to podwójny sterownik silników DC ze złączem Gravity, zasilanych napięciem 2,5...12V o maksymalnym poborze prądu 1,2A (3,2A w szczycie) na kanał. DFRobot DRI0044-A
Brak towaru
Wysokoprądowy sterownik silnika DC z pomiarem prądu 36v20 CS Pololu umożliwia sterowanie silnikami DC o wysokim napięciu i dużym poborze prądu z jednoczesnym pomiarem obciążenia. Moduł sprawdza się w zaawansowanych projektach robotycznych i napędowych, gdzie wymagane są wysoka wydajność prądowa, elastyczne tryby sterowania oraz możliwość precyzyjnej kontroli prądu silnika.