34,62 zł Netto
Nośnik sterownika silnika krokowego układem DRV8834 umożliwia precyzyjne sterowanie silnikami krokowymi w aplikacjach niskonapięciowych. Moduł znajduje zastosowanie w robotyce, mechanizmach precyzyjnych i projektach prototypowych, gdzie istotne pozostają mikrokrokowa praca, kompaktowe wymiary oraz łatwa integracja z mikrokontrolerami.DRV8834 Low-Voltage Stepper Motor Driver Carrier . Pololu 2134
Nośnik sterownika silnika krokowego DRV8834 przeznaczony do sterowania bipolarnymi silnikami krokowymi w aplikacjach niskonapięciowych. Moduł opracowany przez Pololu wykorzystuje układ DRV8834 firmy Texas Instruments, zapewniając mikrokrokowe sterowanie prądem cewek oraz płynną pracę napędu. Płytka umożliwia regulację prądu silnika za pomocą potencjometru oraz obsługę standardowych trybów krokowych, co ułatwia integrację z mikrokontrolerami i systemami sterowania ruchem.
Moduł przystosowany do pracy przy niskich napięciach zasilania sprawdza się w kompaktowych konstrukcjach, robotyce mobilnej, mechanizmach precyzyjnych oraz urządzeniach zasilanych bateryjnie. Format nośnika ułatwia montaż na płytkach prototypowych i w gniazdach rasterowych, a wyprowadzenia sygnałów STEP/DIR pozwalają na prostą obsługę z poziomu oprogramowania.
Cechy
Producent BTC Korporacja sp. z o. o. Lwowska 5 05-120 Legionowo Polska sprzedaz@kamami.pl 22 767 36 20
Osoba odpowiedzialna BTC Korporacja sp. z o. o. Lwowska 5 05-120 Legionowo Polska sprzedaz@kamami.pl 22 767 36 20
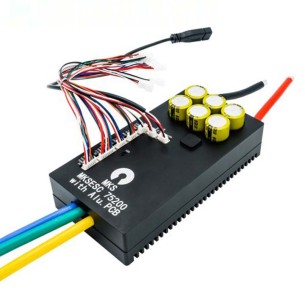
Regulator prędkości ESC ODrive3.6 przeznaczony jest do zasilania dwóch trójfazowych silników bezszczotkowych w różnych aplikacjach, takich jak roboty jeżdżące, roboty kroczące czy gimbale. Obsługuje zakres napięcia wejściowego od 12 V do 56 V oraz maksymalny prąd do 60 A. Makerbase ODrive3.6
Zestaw z regulatorem prędkości ESC ODrive3.6 oraz silnikiem BLDC MKS X2212. Sterownik przeznaczony jest do zasilania dwóch trójfazowych silników bezszczotkowych w różnych aplikacjach, takich jak roboty jeżdżące, roboty kroczące czy gimbale. Obsługuje zakres napięcia wejściowego od 12 V do 56 V oraz maksymalny prąd do 60 A. Makerbase ODrive3.6 Kit
Kontroler prędkości oparty na otwartym standardzie VESC, przeznaczony do deskorolek, hulajnóg i rowerów elektrycznych. Obsługuje napięcie od 14 do 75 V i prąd ciągły do 100 A, oferując różne tryby sterowania silnikami BLDC oraz szeroki wybór interfejsów (PPM, UART, I2C, USB-C, CAN). Dzięki kompaktowej konstrukcji i rozbudowanym zabezpieczeniom zapewnia niezawodność, elastyczną konfigurację oraz wygodną integrację z komputerem i smartfonem. Makerbase VESC 75100
Brak towaru
Regulator prędkości przeznaczony do pracy przy wysokim napięciu i dużych prądach, idealny do pojazdów elektrycznych, e-foil czy robotyki. Obsługuje napięcia do 84 V oraz prąd ciągły do 200 A, a dzięki procesorowi ARM Cortex-M4 STM32F405RG zapewnia precyzyjne sterowanie i szybkie przetwarzanie sygnałów. Umożliwia pracę w różnych trybach sterowania, współpracuje z silnikami BLDC i DC zarówno w wersji z czujnikami, jak i bezczujnikowej, a konfiguracja odbywa się przez USB lub moduł Bluetooth z użyciem VESC Tool. Makerbase VESC 75200 V2
Brak towaru
Zaawansowany regulator prędkości przeznaczony do zasilania trójfazowych silników bezszczotkowych w różnych aplikacjach, takich jak elektryczne hulajnogi, deskorolki elektryczne i elektryczne rowery. Obsługuje zakres napięcia wejściowego od 8 V do 60 V, co odpowiada od 3S do 13S w przypadku akumulatorów LiPo oraz maksymalny prąd do 50 A. Makerbase VESC MINI 6.7 Pro
Brak towaru
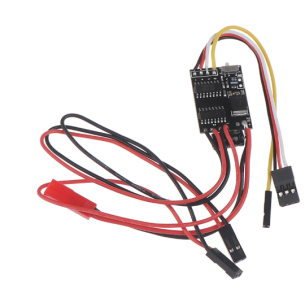
Moduł 2-kanałowego sterownika silników szczotkowych z funkcją miksowania sygnałów PWM. Pozwala sterować dwoma silnikami DC o poborze prądu do 5 A na kanał
Moduł 3-kanałowego sterownika silników szczotkowych z funkcją miksowania sygnałów PWM. Pozwala sterować trzema silnikami DC o poborze prądu do 15 A na kanał
Moduł 3-kanałowego sterownika silników szczotkowych z funkcją miksowania sygnałów PWM. Pozwala sterować trzema silnikami DC o poborze prądu do 3 A na kanał
Brak towaru
Moduł sterownika ESC do silnika bezszczotkowego o wydajności prądowej do 40 A. Może współpracować z pakietami LiPo od 3S do 6S. Wykorzystuje oprogramowanie BLHeli_32. Skystars Talon32
Moduł sterownika ESC do silnika bezszczotkowego o wydajności prądowej do 120 A. Może współpracować z pakietami LiPo od 5S do 12S. Wykorzystuje oprogramowanie BLHeli_32. FLYCOLOR X-CROSS HV
Moduł sterownika ESC do silnika bezszczotkowego o wydajności prądowej do 80 A. Może współpracować z pakietami LiPo od 5S do 12S. Wykorzystuje oprogramowanie BLHeli_32. FLYCOLOR X-CROSS HV
Brak towaru
Moduł programujący do sterowników ESC z serii AM32 i BLS32. Pozwala w łatwy sposób zaktualizować oprogramowanie sterownika przez złącze USB typu C. RhinoESC Crawler
Panelowy kontroler prędkości silnika szczotkowego UX-52 to wszechstronne urządzenie z regulacją prędkości od 90 do 1400 obr./min. Oferuje precyzyjną kontrolę nad silnikami o napięciu wejściowym 220VAC, charakteryzując się solidną konstrukcją i wygodnym wyświetlaczem cyfrowym.
Brak towaru
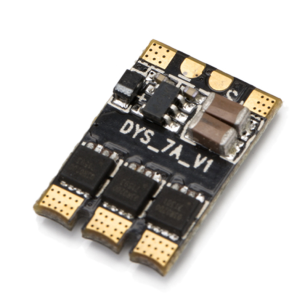
Miniaturowy sterownik ESC silnika bezszczotkowego 7A 1-2S BLheli_S XSD7A to kompaktowe urządzenie o dużej wydajności, idealne do kontroli silników bezszczotkowych w małych projektach. Dzięki niskiej wadze i solidnej mocy, nadaje się do dronów, modeli RC i innych aplikacji wymagających precyzyjnej kontroli silnika.
Sterownik, który umożliwia kontrolę dowolnego 3-fazowego silnika BLDC. Wyposażony został w wbudowaną łączność WiFi i Bluetooth oraz zintegrowany czujnik efektu Halla TMAG5273 i wzmacniacze czujników prądu INA240A1, dzieki czemu pozwala na wykrozystanie zaawansowanych algorytmów FOC. SparkFun ROB-22132
Moduł ze sterownikiem silnika krokowego oparty na układzie DRV8434. Pozwala na zasilanie silnika bipolarnego prądem do 1,2 A na fazę i napięciem od 4,5 V do 48 V. Pololu 3762
Nośnik sterownika silnika krokowego układem DRV8834 umożliwia precyzyjne sterowanie silnikami krokowymi w aplikacjach niskonapięciowych. Moduł znajduje zastosowanie w robotyce, mechanizmach precyzyjnych i projektach prototypowych, gdzie istotne pozostają mikrokrokowa praca, kompaktowe wymiary oraz łatwa integracja z mikrokontrolerami.DRV8834 Low-Voltage Stepper Motor Driver Carrier . Pololu 2134