










924,30 zł Netto
Dual VNH3SP30 Motor Driver Carrier MD03A umożliwia niezawodne sterowanie dwoma silnikami DC o dużym zapotrzebowaniu prądowym. Moduł sprawdza się w robotach i pojazdach mobilnych, gdzie wymagane pozostają kompaktowe wymiary, wysoka wydajność oraz odporność na przeciążenia. Pololu 707
Dual VNH3SP30 Motor Driver Carrier MD03A przeznaczony do sterowania dwoma silnikami prądu stałego w projektach robotycznych, mobilnych i mechatronicznych wymagających obsługi wysokich prądów. Moduł oparty na dwóch mostkach H VNH3SP30 umożliwia niezależną regulację prędkości i kierunku obrotów każdego silnika przy zachowaniu kompaktowej formy płytki nośnej.
Sterownik obsługuje sygnały logiczne kompatybilne z popularnymi mikrokontrolerami, umożliwiając sterowanie PWM oraz kontrolę kierunku obrotów. Zintegrowane zabezpieczenia przed przegrzaniem, przeciążeniem i zwarciem zwiększają niezawodność pracy w aplikacjach prototypowych i docelowych. Moduł znajduje zastosowanie w robotach mobilnych, pojazdach autonomicznych, platformach testowych oraz układach napędowych wymagających dużej mocy.
Cechy
Producent BTC Korporacja sp. z o. o. Lwowska 5 05-120 Legionowo Polska sprzedaz@kamami.pl 22 767 36 20
Osoba odpowiedzialna BTC Korporacja sp. z o. o. Lwowska 5 05-120 Legionowo Polska sprzedaz@kamami.pl 22 767 36 20
KAmod Motor Driver to zaawansowany sterownik silnika DC zasilany napięciem 6-30 V, umożliwiający regulację mocy metodą PWM oraz kontrolę kierunku obrotów, kompatybilny z sygnałami analogowymi i PWM z różnych źródeł, wyposażony w zabezpieczenia przeciążeniowe i termiczne oraz funkcje łagodnego startu i zatrzymania
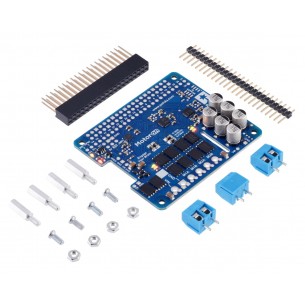
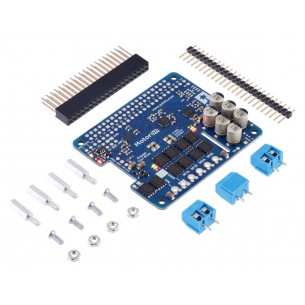
Sterownik silników DC, który pozwala na kontrolowanie ruchu dwóch napędów za pomocą interfejsu I2C. Płytka bez złączy. Pololu 5038
Brak towaru
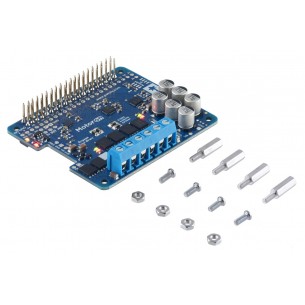
Sterownik silników DC, który pozwala na kontrolowanie ruchu dwóch napędów za pomocą interfejsu I2C. Płytka ze złączami do montażu. Pololu 5037
Brak towaru
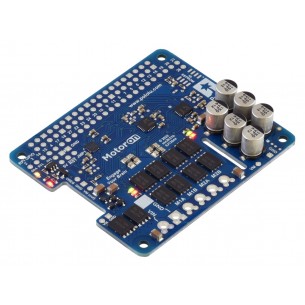
Sterownik silników DC, który pozwala na kontrolowanie ruchu dwóch napędów za pomocą interfejsu I2C. Płytka z przylutowanymi złączami. Pololu 5036
Brak towaru
Moduł sterownika silnika bezszczotkowego (regulator ESC) o wydajności prądowej do 30 A
Brak towaru
Moduł sterownika silnika bezszczotkowego (regulator ESC) o wydajności prądowej do 35 A
Brak towaru
Moduł sterownika silnika bezszczotkowego (regulator ESC) o wydajności prądowej do 45 A
Brak towaru
Sterownik silników DC, który pozwala na kontrolowanie ruchu dwóch napędów za pomocą interfejsu I2C. Płytka bez złączy. Pololu 5059
Brak towaru
Sterownik silników DC, który pozwala na kontrolowanie ruchu dwóch napędów za pomocą interfejsu I2C. Złącza do montażu. Pololu 5058
Brak towaru
Sterownik silników DC, który pozwala na kontrolowanie ruchu dwóch napędów za pomocą interfejsu I2C. Płytka z przylutowanymi złączami. Pololu 5057
Brak towaru
Sterownik silników DC, który pozwala na kontrolowanie ruchu dwóch napędów za pomocą interfejsu I2C. Płytka bez złączy. Pololu 5056
Brak towaru
Sterownik silników DC, który pozwala na kontrolowanie ruchu dwóch napędów za pomocą interfejsu I2C. Płytka ze złączami do montażu. Pololu 5055
Brak towaru
Sterownik silników DC, który pozwala na kontrolowanie ruchu dwóch napędów za pomocą interfejsu I2C. Płytka z przylutowanymi złączami. Pololu 5054
Brak towaru
Sterownik silników DC, który pozwala na kontrolowanie ruchu dwóch napędów za pomocą interfejsu I2C. Płytka bez złączy. Pololu 5053
Brak towaru
Sterownik silników DC, który pozwala na kontrolowanie ruchu dwóch napędów za pomocą interfejsu I2C. Płytka ze złączami do montażu. Pololu 5052
Brak towaru
Sterownik silników DC, który pozwala na kontrolowanie ruchu dwóch napędów za pomocą interfejsu I2C. Płytka z przylutowanymi złączami. Pololu 5051
Brak towaru
Sterownik silników DC, który pozwala na kontrolowanie ruchu dwóch napędów za pomocą interfejsu I2C. Płytka bez złączy. Pololu 5050
Brak towaru
Dual VNH3SP30 Motor Driver Carrier MD03A umożliwia niezawodne sterowanie dwoma silnikami DC o dużym zapotrzebowaniu prądowym. Moduł sprawdza się w robotach i pojazdach mobilnych, gdzie wymagane pozostają kompaktowe wymiary, wysoka wydajność oraz odporność na przeciążenia. Pololu 707