33,57 zł Netto
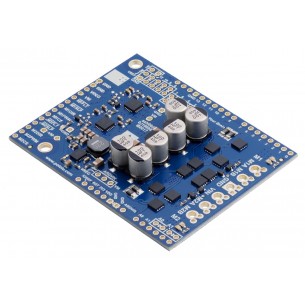
Niewielki, wydajny i ekonomiczny shield do Arduino, idealny do małych silników DC i projektów o niskim napięciu. Oferuje elastyczne tryby sterowania, solidne zabezpieczenia i opcję zwiększenia prądu przez zrównoleglenie kanałów. Świetny wybór do robotyki amatorskiej i edukacji. Pololu 2511
Kompaktowy shield do Arduino umożliwiający sterowanie dwoma szczotkowymi silnikami DC (lub jednym o podwyższonym prądzie). Wykorzystuje układ DRV8835 (podwójny mostek H), przystosowany do niskich napięć i małych silników. Dzięki gotowej bibliotece Arduino oraz prostemu okablowaniu sprawdzi się w robotach, projektach edukacyjnych i prototypach mechatronicznych.
Uwaga: płytka Arduino nie jest dołączona
Cechy
Producent BTC Korporacja sp. z o. o. Lwowska 5 05-120 Legionowo Polska sprzedaz@kamami.pl 22 767 36 20
Osoba odpowiedzialna BTC Korporacja sp. z o. o. Lwowska 5 05-120 Legionowo Polska sprzedaz@kamami.pl 22 767 36 20
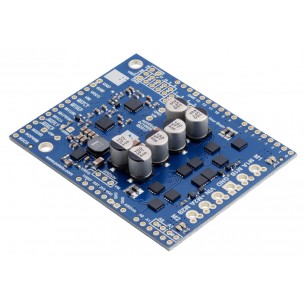
Niewielki, wydajny i ekonomiczny shield do Arduino, idealny do małych silników DC i projektów o niskim napięciu. Oferuje elastyczne tryby sterowania, solidne zabezpieczenia i opcję zwiększenia prądu przez zrównoleglenie kanałów. Świetny wybór do robotyki amatorskiej i edukacji. Pololu 2511
Moduł z 2-kanałowym sterownikiem silników DC do płytek Arduino. Pozwala na sterowanie napędami o napięciu zasilania od 6 do 32 V i poborze prądu do 0,65 A. Pololu 2512
X-NUCLEO-IHM02A1 to moduł sterownika dwóch silników krokowych oparty na dwóch układach L6470. Poziom logiczny 3,3 lub 5 V, sterowanie przez SPI. Złącza zgodne z Arduino i STM32 Nucleo
Brak towaru
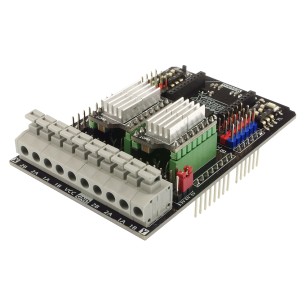
Quad DC Motor Driver Shield to sterownik silników DC kompatybilny z Arduino, który pozwala na sterowanie 4 silnikami DC napięciem w zakresie 2,5...13,5V i prądem do 1,2A. DFRobot DRI0039
Sterownik silników prądu stałego, oparty na układzie L298. Zgodny z Arduino, napięcie zasilania silnika 4,8-35V, maksymalny prąd pobierany przez silnik 2A na kanał. SparkFun DEV-14129
Pololu Dual G2 High-Power Motor Driver 24v14 to rozszerzenie pozwalające na sterowanie dwoma silnikami prądu stałego przeznaczone dla płytek Arduino. Silniki mogą być zasilane napięciem 6,5...40V i pobierać maksymalnie prąd o natężeniu do 14A. Pololu 2516
Pololu Dual G2 High-Power Motor Driver 18v18 to rozszerzenie pozwalające na sterowanie dwoma silnikami prądu stałego przeznaczone dla płytek Arduino. Silnik mogą być zasilane napięciem 6,5-30V i pobierać maksymalnie prąd o natężeniu do 18A. Pololu 2515
Pololu Dual G2 High-Power Motor Driver 24v18 to rozszerzenie pozwalające na sterowanie dwoma silnikami prądu stałego przeznaczone dla płytek Arduino. Silnik mogą być zasilane napięciem 6,5...40V i pobierać maksymalnie prąd o natężeniu do 18A. Pololu 2518
Brak towaru
Pololu Dual G2 High-Power Motor Driver 18v22 to rozszerzenie pozwalające na sterowanie dwoma silnikami prądu stałego przeznaczone dla płytek Arduino. Silnik mogą być zasilane napięciem 6,5-30V i pobierać maksymalnie prąd o natężeniu do 22A. Pololu 2517
Brak towaru
Moduł sterownika silnika krokowego DRV8825 dla Arduino. Pozwala na sterowanie dwoma napędami, wyposażony w złącze XBee. DFRobot DRI0023
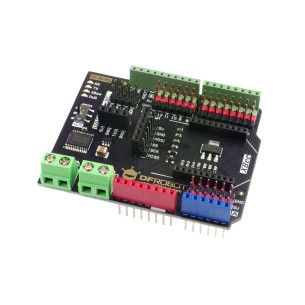
Gravity: IO Expansion & Motor Driver Shield to płytka rozszerzeń kompatybilna z Arduino, która udostępnia cyfrowe porty I/O, piny analogowe interfejsy I2C, SPI i UART, a także sterownik silników DC. DFRobot DFR0502
Dual MAX14870 Motor Driver to podwójny sterownik silników DC kompatybilny ze standardem Arduino pozwalający na wysterowanie dwóch silników DC napięciem 4,5-36V prądem ciągłym 1,7A. Pololu 2519
X-NUCLEO-IHM15A1 to płytka rozszerzeń z podwójnym sterownikiem silników DC zasilanym napięciem w zakresie 7...45V o maksymalnym prądzie wyjściowym 1,5A na każdym z kanałów. Kompatybilny z STM32 Nucleo. X-NUCLEO-IHM15A1
X-NUCLEO-IHM16M1 to płytka rozszerzeń ze sterownikiem trójfazowego bezszczotkowego silnika zasilanym napięciem w zakresie 7-45 V o maksymalnym prądzie wyjściowym 1,5 A w każdym z kanałów. Kompatybilny z STM32 Nucleo. X-NUCLEO-IHM16M1
Podwójny sterownik silników DC przeznaczony dla Arduino, który umożliwia zasilanie silnika napięciem w zakresie 4,5-28V i poborze prądu przy pracy ciągłej 2,6A (5A w szczycie) dwóch silników DC. Pololu 2520
Shield z dwukanałowym sterownikiem silników DC dla Arduino. Ma napięcie pracy od 7 do 30 V i prąd ciągły do 10 A. Może być sterowany sygnałem PWM lub za pomocą wbudowanych przycisków. Cytron SHIELD-MDD10
Niewielki, wydajny i ekonomiczny shield do Arduino, idealny do małych silników DC i projektów o niskim napięciu. Oferuje elastyczne tryby sterowania, solidne zabezpieczenia i opcję zwiększenia prądu przez zrównoleglenie kanałów. Świetny wybór do robotyki amatorskiej i edukacji. Pololu 2511