- Obecnie brak na stanie


Jerzy Osiowski, Jerzy Szabatin
Tytuł: Podstawy teorii obwodów Tom III
Autor: Osiowski Jerzy, Szabatin Jerzy
ISBN: 83-204-2911-0
Oprawa: miękka
Wydawnictwo: WNT
Opis książki
W tomie III opisano metody sieciowe w ujęciu sformalizowanym, opartym na teorii grafów, uzupełnione o metodę tableau i zmodyfikowaną metodę napięć węzłowych. Przedstawiono teorię czwórników. Opisano liniowe układy transmisyjne i układy pasywne. Omówiono grafy przepływowe, schematy blokowe i metodę równań stanu wraz z elementami teorii stabilności układów liniowych i teorii linii długich.
Wszystkie zagadnienia teoretyczne zilustrowano wieloma przykładami, a na końcu każdego rozdziału zamieszczono zadania i problemy do samodzielnego rozwiązania.
Podręcznik jest przeznaczony dla studentów wydziałów elektroniki, informatyki, telekomunikacji i elektrotechniki na wyższych uczelniach technicznych. Może być również przydatny dla inżynierów wymienionych specjalności.
Spis treści
TOM III
Przedmowa do tomu trzeciego
Przedmowa do drugiego wydania
Wykaz oznaczeń (uzupełnienie do tomów I i II)
Rozdział 7. Metody sieciowe
7.1. Elementy teorii grafów
7.1.1. Graf i pojęcia z nim związane
7.1.2. Grafy sieciowe
7.1.3. Drzewo grafu i pojęcia pokrewne
7.1.4. Przekroje grafu
7.1.5. Układy fundamentalne konturów i przekrojów
7.2. Opis algebraiczny grafu sieciowego
7.2.1. Macierze węzłowe
7.2.2. Macierze obwodowe
7.2.3. Macierze przekrojów
7.2.4. Związki między macierzami
7.3. Metody analizy sieci elektrycznych
7.3.1. Równania równowagi i ich konsekwencje
7.3.2. Przekształcenie obwodowe i przekształcenie węzłowe
7.3.3. Zasada Tellegena
7.3.4. Równania gałęziowe sieci SLS
7.3.5. Metoda prądów obwodowych
7.3.6. Metoda napięć węzłowych
7.3.7. Przykłady i uzupełnienia
7.3.8. Inne metody sieciowe
Zadania do rozdziału 7
Rozdział 8. Czwórniki
8.1. Opis zaciskowy czwórnika
8.1.1. Równania zaciskowe czwórnika
8.1.2. Macierzowy zapis równań czwórnika
8.1.3. Interpretacja parametrów charakterystycznych i schematy zastępcze czwórnika
8.2. Funkcje układowe i parametry robocze czwórnika
8.2.1. Funkcje układowe
8.2.2. Parametry robocze
8.3. Rodzaje symetrii czwórnika
8.3.1. Czwórniki odwracalne
8.3.2. Czwórniki impedancyjnie symetryczne
8.3.3. Czwórniki symetryczne
8.4. Trójnik a czwórnik
8.4.1. Opis trójników
8.4.2. Czwórniki o strukturze trójnikowej
8.5. Łączenie czwórników
8.6. Inne sposoby opisu czwórników
8.6.1. Opis falowy czwórnika
8.6.2. Wzmianka o opisie czwórnika za pomocą parametrów rozproszenia
Zadania do rozdziału 8
Rozdział 9. Właściwości transmisyjne układów liniowych
9.1. Splot i przekształcenie Fouriera
9.1.1. Splot funkcji i jego właściwości
9.1.2. Splot funkcji z dystrybucją
9.1.3. Przekształcenie Fouriera
9.2. Układy transmisyjne
9.2.1. Czwórnik jako układ transmisyjny
9.2.2. Charakterystyki czasowe
9.2.3. Zastosowania splotu
9.3. Stabilność układu transmisyjnego
9.3.1. Stabilność względem pobudzenia
9.3.2. Kryteria stabilności
9.4. Charakterystyki częstotliwościowe
9.4.1. Podstawowe pojęcia i interpretacje
9.4.2. Związki między charakterystykami
9.4.3. Podstawowy warunek realizowalności układu
9.5. Charakterystyki asymptotyczne i zagadnienia aproksymacji
9.5.1. Charakterystyki asymptotyczne
9.5.2. Wybrane zagadnienia aproksymacji
Zadania do rozdziału 9
Rozdział 10. Układy pasywne
10.1. Dwójniki pasywne
10.1.1. Funkcje rzeczywiste dodatnie
10.1.2. Podstawowe twierdzenia
10.1.3. Właściwości funkcji wymiernych rzeczywistych dodatnich
10.1.4. Dwójniki reaktancyjne
10.1.5. Dwójniki RC i dwójniki RL
10.2. Czwórniki i wielowrotniki pasywne
10.2.1. Macierze rzeczywiste dodatnie
10.2.2. Podstawowe twierdzenia i właściwości
10.2.3. Badanie dodatniości macierzy
10.3. Transmitancje układów pasywnych
10.3.1. Właściwości transmitancji czwórników pasywnych
10.3.2. Układy minimalno-fazowe i zagadnienia realizacji układów pasywnych
Zadania do rozdziału 10
Rozdział 11. Grafy przepływowe i schematy blokowe
11.1. Grafy przepływowe
11.1.1. Graf przepływowy a układ równań liniowych
11.1.2. Przekształcanie grafu przepływowego
11.1.3. Reguła Masona
11.1.4. Grafy Coatesa
11.2. Schematy blokowe
11.2.1. Schemat blokowy jako model układu
11.2.2. Schemat blokowy a graf przepływowy
11.2.3. Stabilność układu zamkniętego
Zadania do rozdziału 11
Rozdział 12. Metoda równań stanu
12.1. Opis układów za pomocą równań stanu
12.1.1. Ogólne sformułowanie równań stanu
12.1.2. Opis układów SLS za pomocą równań stanu
12.2. Rozwiązanie równań stanu układów SLS
12.2.1. Rozwiązanie równań stanu w dziedzinie czasu
12.2.2. Rozwiązanie równań stanu w dziedzinie zespolonej
12.3. Stabilność układów SLS
12.3.1. Stabilność względem warunków początkowych
12.3.2. Stabilność względem pobudzenia
Zadania do rozdziału 12
Rozdział 13. Unie długie
13.1. Linia długa i jej równania
13.1.1. Opis obwodowy linii długiej
13.1.2. Związki opisu obwodowego z opisem polowym
13.2. Stan ustalony przy pobudzaniu sinusoidalnym
13.2.1. Opis linii długiej w stanie ustalonym
13.2.2. Nieskończona linia długa
13.2.3. Linia długa o skończonej długości
13.2.4. Parametry falowe linii długiej
13.2.5. Linia długa bez strat
13.2.6. Dyskusja rozwiązań linii długiej bez strat przy różnych obciążeniach
13.2.7. Rozkłady amplitudy napięcia i amplitudy prądu w linii długiej ze stratami
13.3. Linia długa przy pobudzaniu dowolnym
13.3.1. Opis linii długiej przy pobudzaniu dowolnym
13.3.2. Linia długa o skończonej długości
13.3.3. Przykłady i komentarze
Zadania do rozdziału 13
Dodatek 5
Dodatek 6
Literatura
Skorowidz (uzupełnienia)
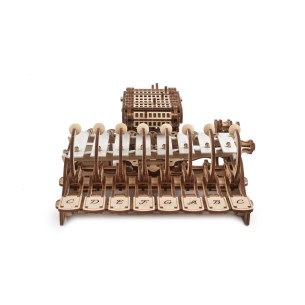
Mechaniczna Celesta od UGEARS to niezwykła zabawka edukacyjna i instrument muzyczny w jednym, który umożliwia zarówno zbudowanie własnoręcznie funkcjonalnego modelu mechanicznego, jak i eksperymentowanie z tworzeniem oraz odtwarzaniem muzyki, co czyni go wyjątkowym prezentem dla osób w każdym wieku, łączącym w sobie urok rzemiosła, precyzję modelarstwa i piękno muzyki. UGears 70178
Brak towaru
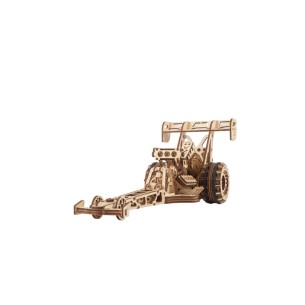
Model UGEARS Top Fuel Dragster to wyszukany i dynamiczny projekt DIY, który za pomocą 321 części i zaawansowanych mechanizmów sprężynowych ożywia emocje wyścigów dragsterowych na biurku każdego miłośnika motoryzacji. UGears 70174
Brak towaru
Samochód Retro UGR-T to model, który z pewnością wzbudzi zainteresowanie każdego, kto lubi połączenie historii z rękodziełem. Jest to nie tylko wspaniały element dekoracyjny, ale także znakomita okazja do spędzenia czasu na twórczej zabawie i zanurzenia się w epoce, gdy samochody były czymś więcej niż tylko środkiem transportu. UGears 70175
Brak towaru
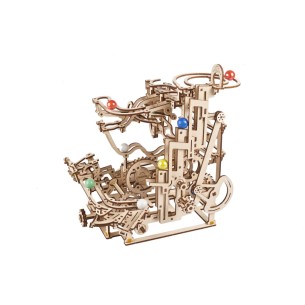
Marble Run Wciągnik Spiralny to nie tylko genialna zabawka, ale także obiekt, który może ozdobić każde wnętrze, będąc zarówno elegancką dekoracją, jak i fascynującym mechanizmem. To prezent, który z pewnością wywoła uśmiech na twarzy każdego, kto ceni sobie inżynierski kunszt i przyjemność z samodzielnego montażu. UGears 70177
Brak towaru
UGears Stara Wieża Zegarowa to nie tylko model do składania, ale i inspiracja do opowiadania historii, nauki przez zabawę oraz doskonały sposób na udekorowanie przestrzeni w stylu retro. Przemyślany design i interaktywność sprawiają, że jest to idealny prezent zarówno dla dorosłych, jak i dla dzieci, zachęcający do kreatywnego spędzania czasu. UGears 70169
Brak towaru
Pickup Drwala od UGEARS to nie tylko model do składania, ale również pełnoprawny, działający pojazd, który po zmontowaniu stanie się ozdobą każdego wnętrza, a także zapewni wiele godzin fascynującej zabawy i edukacji. Idealnie sprawdzi się jako prezent dla miłośnika retro motoryzacji oraz modelarstwa. UGears 70171
Brak towaru
Marble Run Wciągnik Poziomowy od UGEARS to idealny prezent dla każdego, kto kocha wyzwania konstrukcyjne oraz radość z obserwacji działania mechanizmów, które samemu się zbudowało. Jest to model, który z pewnością dostarczy godzin fascynującej zabawy i nauki zarówno dla dzieci, jak i dorosłych. UGears 70170
Brak towaru
Brak towaru
Brak towaru
Ten model to idealny prezent dla entuzjastów retro, miłośników zegarmistrzostwa oraz kolekcjonerów. Vintage Budzik od UGEARS to nie tylko projekt do samodzielnego wykonania, ale także pamiątka z czasów, gdy każdy dzień rozpoczynał się od mechanicznego „drrrryn”. UGears 70163
Brak towaru
Brak towaru
UGears Sky Watcher to zegar, który łączy w sobie piękno nauki i sztuki, zapewniając unikalne doświadczenie zarówno podczas montażu, jak i użytkowania. UGears 70162
Brak towaru
Drift Cobra Racing Car od UGears to wyjątkowy model, który oferuje nie tylko wspaniały wygląd, ale i ekscytujące możliwości mechaniczne. Idealny dla pasjonatów konstrukcji drewnianych i motoryzacji, gwarantuje satysfakcję z budowy oraz z jazdy. UGears 70161
Brak towaru
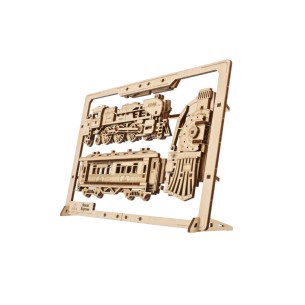
Puzzle 2,5D Lokomotywa Parowa to nie tylko atrakcja dla miłośników pociągów, ale również ciekawe wyzwanie dla modelarzy, łączące w sobie piękno i nostalgię epoki parowozów z innowacyjnym podejściem do prezentacji modeli. UGears 70207
Brak towaru
UGEARS Zeppelin 2,5D to więcej niż puzzle – to pełne historii i mechaniki dzieło sztuki, które oferuje satysfakcję z samodzielnego złożenia i możliwość podziwiania dynamicznych, historycznych sterowców w domowym zaciszu. UGears 70208
Brak towaru
UGears Winged Sports Coupe to łatwy w montażu, stylowy model coupe w skali 1:24 z funkcjonalnymi skrzydłowymi drzwiami i dwoma trybami jazdy, oferujący ponad 4 godziny satysfakcjonującej konstrukcji i nostalgiczny powiew klasyki motoryzacyjnej. UGears 70205
Brak towaru
Jerzy Osiowski, Jerzy Szabatin