

- Out-of-Stock


Jerzy Osiowski, Jerzy Szabatin
Title: Fundamentals of circuit theory Volume III
Author: Osiowski Jerzy, Szabatin Jerzy
ISBN: 83-204-2911-0
Binding: soft
Publisher: WNT
Book description
Volume III describes network methods in a formalized approach, based on graph theory, supplemented with a tableau method and a modified method of node tensions. The four-part theory is presented. Linear transmission systems and passive systems have been described. Flow charts, block diagrams and method of state equations together with elements of the stability theory of linear systems and long line theory were discussed.
All the theoretical issues have been illustrated with many examples, and at the end of each chapter there are tasks and problems to solve independently.
The manual is intended for students of the faculties of electronics, computer science, telecommunications and electrical engineering at technical universities. It can also be useful for engineers of the mentioned specialties.
Table of Contents
VOLUME III
Preface to the third volume
Preface to the second edition
List of markings (supplement to volumes I and II)
Chapter 7. Network methods
7.1. Elements of graph theory
7.1.1. Graf and concepts associated with it
7.1.2. Network graphs
7.1.3. Graph tree and related concepts
7.1.4. Cross-sections of the graph
7.1.5. Basic layouts of contours and sections
7.2. Algebraic description of the network graph
7.2.1. Node matrices
7.2.2. Perimeter matrices
7.2.3. Matrix cross-sections
7.2.4. Relationships between matrices
7.3. Methods for analyzing electrical networks
7.3.1. Equations of equilibrium and their consequences
7.3.2. Peripheral transformation and node transformation
7.3.3. Tellegena principle
7.3.4. Branch equations of the SLS network
7.3.5. The peripheral current method
7.3.6. Nodal voltage method
7.3.7. Examples and additions
7.3.8. Other network methods
Tasks for chapter 7
Chapter 8. Crosses
8.1. Clamp description of the cross-over
8.1.1. Clamp equations of the cross-over
8.1.2. Matrix record of four equations
8.1.3. Interpretation of characteristic parameters and substitute diagrams of the cross-over
8.2. System functions and working parameters of the cross-over
8.2.1. System functions
8.2.2. Working parameters
8.3. Types of cross-section symmetry
8.3.1. Crossed reversible
8.3.2. Circuits are impedently symmetrical
8.3.3. Symmetrical crossovers
8.4. A tee and a cross
8.4.1. Description of tees
8.4.2. Cross-pieces with three-part structure
8.5. Connecting fours
8.6. Other ways to describe the fours
8.6.1. Wave description of the cross-over
8.6.2. Mention of the cross-over description using the scatter parameters
Tasks for chapter 8
Chapter 9. Transmission properties of linear systems
9.1. Weave and Fourier transform
9.1.1. Weave the function and its properties
9.1.2. Weave functions with distribution
9.1.3. Fourier transform
9.2. Transmission systems
9.2.1. Four-core as a transmission system
9.2.2. Time characteristics
9.2.3. Applications of weave
9.3. Stability of the transmission system
9.3.1. Stability against arousal
9.3.2. Stability criteria
9.4. Frequency characteristics
9.4.1. Basic concepts and interpretations
9.4.2. Relationships between characteristics
9.4.3. The basic condition for the system's implementation
9.5. Asymptotic characteristics and approximation issues
9.5.1. Asymptotic characteristics
9.5.2. Selected problems of approximation
Tasks for chapter 9
Chapter 10. Passive systems
10.1. Passive coils
10.1.1. Real positive functions
10.1.2. Basic theorems
10.1.3. Properties of real real rational functions
10.1.4. Reactive strand
10.1.5. RC coils and RL co-terminators
10.2. Passive multiplicators and reels
10.2.1. Real positive matrices
10.2.2. Basic theorems and properties
10.2.3. Matrix positiveness test
10.3. Transmittances of passive systems
10.3.1. Transmission properties of passive quarters
10.3.2. Minimum-phase systems and issues of passive systems implementation
Tasks for chapter 10
Chapter 11. Flow charts and block diagrams
11.1. Flow charts
11.1.1. Flow graph and a system of linear equations
11.1.2. Transforming a flow graph
11.1.3. Mason rule
11.1.4. Coates' graphs
11.2. Block diagrams
11.2.1. Block diagram as a model of the system
11.2.2. Flowchart and flow graph
11.2.3. Stability of the closed system
Tasks for chapter 11
Chapter 12. Method of state equations
12.1. Description of systems using state equations
12.1.1. General formulation of state equations
12.1.2. Description of SLS systems using state equations
12.2. Solution of SLS state equations
12.2.1. Solution of state equations in the field of time
12.2.2. Solution of state equations in the complex domain
12.3. Stability of SLS systems
12.3.1. Stability against initial conditions
12.3.2. Stability against arousal
Tasks for chapter 12
Chapter 13. Unions long
13.1. Long line and its equations
13.1.1. Peripheral description of the long line
13.1.2. Peripheral description compounds with field description
13.2. Steady state when sinusoidal stimulation
13.2.1. Description of the long line in steady state
13.2.2. Infinite long line
13.2.3. Long line with finite length
13.2.4. Wave parameters of the long line
13.2.5. Long line without losses
13.2.6. Discussion of long-line solutions without losses at various loads
13.2.7. Distribution of voltage amplitude and current amplitude in a long line with losses
13.3. Long line at any stimulation
13.3.1. Description of the long line at any stimulation
13.3.2. Long line with finite length
13.3.3. Examples and comments
Tasks for chapter 13
Appendix 5
Appendix 6
Literature
Index (supplements)
Waveshare AlphaBot, a basic set for building an Arduino-based robot
No product available!
IMU inertial sensor, 10-axis, barometer with temperature compensation, low energy consumption
No product available!
The Open746I-C development board has been designed for the capabilities of the STM32F746IGT6 microcontroller, includes a motherboard and a Core746I microcontroller board. Waveshare Open746I-C Package B
No product available!
No product available!
No product available!
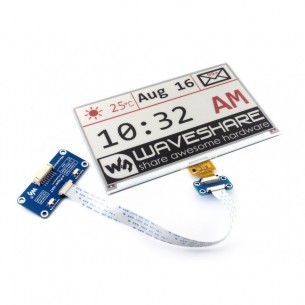
264x176, 2.7inch E-Ink raw display, three-color, SPI interface, without PCB
No product available!
No product available!
Two-channel DC motor controller for DC motors or one step motor control, built on the L293D circuit with additional ESD protection
No product available!
TFT color display module 2,2 "320 x 240 pixels with touch panel. Wavehare 2.2inch 320x240 Touch LCD (A)
No product available!
Waveshare AlphaBot, a development kit for building an Arduino-based robot
No product available!
HDMI 4.3 "480 x 272 pixel color LCD module with touch panel for Raspberry Pi
No product available!
UBox NEO-6M UART GPS module with active antenna, EEPROM memory, battery for maintaining settings and hot start functions
No product available!
5 MPx camera module for Raspberry Pi OV5647 with CSI interface
No product available!
Waveshare AlphaBot, a kit for building an Arduino-based robot with Bluetooth and the Arduino extension
No product available!
USB C8051F programmer with programming and debugging function
No product available!
Waveshare AlphaBot2, the basic set for building an Arduino-based robot
No product available!
Jerzy Osiowski, Jerzy Szabatin