- Obecnie brak na stanie




O książce
Spis treści
1. Wprowadzenie
1.1. Rys historyczny i podstawowe definicje2. Kinematyka manipulatorów
2.1. Wprowadzenie3. Dynamika łańcucha kinematycznego
3.1. Formalizm Lagrange’a4. Dynamika systemów napędowych robotów
4.1. Podstawowe właściwości systemów napędowych5. Jednolita reprezentacja dynamiki robota
5.1. Analogie między układami elektrycznymi i mechanicznymi6. Wykorzystanie modeli dynamiki manipulatorów w układach
sterowania robotów
6.1. Rozwój koncepcji sterowania robotówArduino Mini to moduł przeznaczony do użytkowania na płytce stykowej. Wersja 05 ma mikrokontroler ATmega328 z rodziny AVR w mniejszej obudowie, co umożliwia umieszczenie wszystkich komponentów na jednej stronie płytki. Płytka ma przycisk reset. Wersja 05 ma tak samo rozmieszczone piny jak wersja 04. A000088
Brak towaru
Brak towaru
Brak towaru
Brak towaru
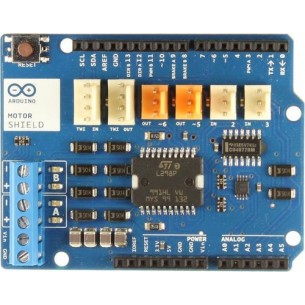
Nakładka do komunikacji bezprzewodowej przeznaczona do płytek Arduino. Wyposażona w złącze kompatybilne z modułami Xbee oraz gniazdo kart microSD. Arduino A000065
Brak towaru
Brak towaru
Brak towaru
Brak towaru
Brak towaru
Brak towaru
Tony Olsson, David Gaetano, Jonas Odhner, Samson Wiklund
Brak towaru
Brak towaru
Brak towaru
Brak towaru
Brak towaru
Brak towaru