

- Out-of-Stock


About the book
Table of Contents
1. Introduction
1.1. Historical outline and basic definitions2. Kinematics of manipulators
2.1. Introduction3. The dynamics of the kinematic chain
3.1. Lagrange formalism4. Dynamics of robot drive systems
4.1. Basic properties of drive systems5. Uniform representation of the dynamics of the robot
5.1. Analogies between electrical and mechanical systems6. The use of dynamics models of manipulators in systems
robot control
6.1. Development of the robot control conceptThe UM7 orientation sensor from CH Robotics is an Attitude and Heading Reference System (AHRS) that contains a three-axis accelerometer, rate gyro, and magnetometer. It combines this data using an Extended Kalman Filter to produce attitude and heading estimates. Pololu - 2741
No product available!
The A-Star 32U4 Mini SV is a programmable module based on the ATmega32U4 from Atmel. Unlike competing products, it has an onboard switching step-down regulator that allows it to be powered efficiently from a 5 V to 36 V supply. Pololu 3104
No product available!
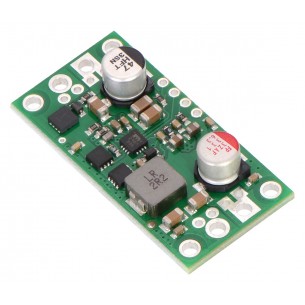
This synchronous switching step-down (or buck) regulator takes an input voltage of up to 38 V and efficiently reduces it to 5 V with an available output current of around 6 A.
No product available!
High performance full NFC compliant expansion board compatible with Raspberry Pi. EXPLORE-NFC
No product available!
SATA line for Banana Pi only. Connects a 2.5 inch Hard Disk to your Banana Pi Computer
No product available!
No product available!
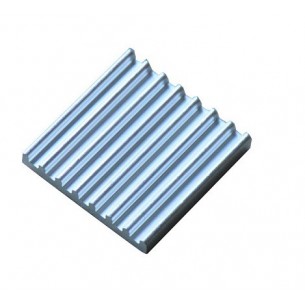
This is an aluminum heat-sink for the Banana Pi RAM Chips. Run cool RAM chips with this little add-on. Just one heat-sink is needed to cover both RAM chips, use the picture below as reference. Signs of RAM or CPU overheating are computer stops responding, frozen screen and power shutt down or cycling.
No product available!
The Serial Port module is specifically designed for Banana Pi with the module use Maxim MAX232 chip and DB9 port
No product available!
Digilent ZYBO SoC platform powered by Xilinx Zynq Z-7010 with a dual-core ARM® Cortex-A9 processor and an Xilinx 7-series FPGA. 410-279
No product available!
NI LabVIEW is a graphical programming platform used by millions of engineers and scientists for problem solving, data acquisition and analysis, instrument control, automated testing and validation, prototyping, and more. 6002-549-000
No product available!
Arduino M0 PRO (M0+ Atmel processor) with build in companion chip to let you debug your application
No product available!
Banana pi BPI-G1 WIFI, BT4.0, Zigbee smart home gateway board
No product available!
Small open-source development board with an on-board HD video camera capable of capturing 720p videos at 30fps
No product available!
No product available!
No product available!
No product available!