- Obecnie brak na stanie




Janusz Narkiewicz
Książka poświęcona systemom nawigacji satelitarnej: w pełni działającemu amerykańskiemu GPS, niekompletnemu systemowi rosyjskiemu GLONASS, powstającemu europejskiemu systemowi Galileo i chińskiemu Beidou oraz naziemnym i satelitarnym systemom wspomagającym ich działanie. Opisano budowę i zasadę działania poszczególnych systemów nawigacji, ich dokładność, źródła możliwych błędów, metody wyznaczania pozycji, prędkości i położenia obiektów w przestrzeni, a także zasadę działania, parametry techniczne i funkcje użytkowe odbiorników GPS. Wskazano też dziedziny, w których GPS i inne systemy nawigacji satelitarnej są lub mogą być stosowane.
Odbiorcy: użytkownicy odbiorników GPS i ci wszyscy zainteresowani nawigacją satelitarną, którzy chcą wzbogacić swoją wiedzę o tej dziedzinie o więcej niż tylko informacje zawarte w instrukcji obsługi odbiornika GPS.
Dostęp w wersji elektronicznej
w serwisie
Spis treści:
Od Autora 7
1. Podstawowe informacje 9
2. Globalny System Nawigacji Satelitarnej - GNSS 18
3. Struktura systemów nawigacji satelitarnej 20
3.1. Segment kosmiczny 21
3.2. Segment naziemny 31
3.3. Segment użytkowników 35
4. Działanie systemów nawigacji satelitarnej 37
4.1. Współrzędne na mapie 37
4.2. Wyznaczanie pozycji czasu 40
4.3. Skale i wzorce czasu 47
4.4. Pasma i kanały transmisji 51
5. Sygnały i informacje z satelitów GPS 56
5.1. Modulacja sygnałów GPS 57
5.2. Kody transmisji GPS 59
5.3. Depesza nawigacyjna GPS 63
6. Czas w systemie GPS 65
7. Pozycja, prędkość i położenie obiektów w przestrzeni 69
7.1. Metoda kodowa wyznaczania pozycji 72
7.2. Metoda fazowa wyznaczania pozycji 73
7.3. Wyznaczanie prędkości i kąta drogi 75
7.4. Metoda różnicowa(DGPS) 77
7.5. Metody wyznaczania pozycji w nawigacji i geodezji 80
7.6. Wyznaczanie położenia obiektów w przestrzeni 82
8. Błędy systemów nawigacji satelitarnej 84
8.1. Błąd jonosferyczny 87
8.2. Błąd troposferyczny 91
8.3. Błąd wielotorowości 94
8.4. Efekty relatywistyczne 96
8.5. Błędy orbit satelitów 97
8.6. Błędy zegara satelity 97
8.7. Błędy wzajemnego ustawienia satelitów
(rozmycia pozycji DOP) 98
8.8. Oszacowanie dokładności pozycji w odbiorniku GPS 101
8.9. Metody poprawy dokładności pozycji 103
9. Wspomaganie systemów nawigacji satelitarnej 106
9.1. Monitorowanie działania systemu nawigacji satelitarnej
przez odbiornik 108
9.2. Naziemne systemy wspomagające 109
9.3. Satelitarne systemy wspomagające 115
9.4. Pseudolity 124
9.5. Systemy informacyjne 125
10. Odbiorniki GPS 127
10.1. Działanie odbiornika 129
10.2. Parametry techniczne odbiorników 132
10.3. Anteny 136
10.4. Funkcje użytkowe odbiorników 141
11. Modernizacja GPS 144
12. GLONASS 148
13. Galileo 156
14. Beidou 169
15. Wykorzystanie GNSS 171
16. Informacje o GNSS znajdziesz w... 182
Dodatki1. Jak powstał GPS 183
2. Porównanie parametrów systemów nawigacji satelitarnej 189
Słowniczek terminów angielskich 191
Literatura 203
Brak towaru
Brak towaru
Moduł z układem 74LVC245AD pozwala łączyć systemy o różnych napięciach zasilania. Dwukierunkowy tryb pracy pozwala na zmianę wyjścia na wejście za pomocą zworki lub wejścia DIR, bez konieczności rozłączania układu. MOD-12.Z
Brak towaru
MOD-13.Z to moduł pozwalający na bezpieczne i wygodne dołączenie karty microSD do projektu z interfejsem SPI. Posiada wbudowany bufor 74HC125. MOD-13
Brak towaru
Adapter SOIC służy do testowania układów w obudowach SMD. Miejsce na stabilizator umożliwia dobranie napięcia zasilającego, a także zasilanie dodatkowych modułów. Moduł wyposażony jest w kondensator filtrujący oraz miejsce na bezpiecznik polimerowy. MOD-14.Z
Brak towaru
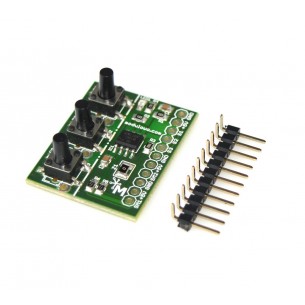
MOD-16.Z zastępuje regulację dwuprzyciskową (więcej - mniej) przełącznikiem obrotowym, którego stan na danym wyjściu zależy od kierunku obrotu. Moduł posiada przycisk w enkoderze oraz wbudowany mikrokontroler Attiny13.
Brak towaru
Sterownik umożliwia niezależne sterowanie dwoma serwomechanizmami modelarskimi za pomocą przycisków lub sygnałów 1/0. Wyprowadzenia pasują do sygnałów serwomechanizmów (SYG, +V, GND), nie ma więc potrzeby stosowania dodatkowych przewodów czy przejściówek. MOD-17.Z
Brak towaru
Brak towaru
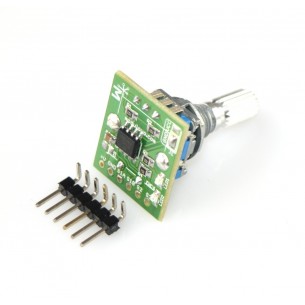
Miniaturowy potencjometr cyfrowy pozwala na zastąpienie potencjometru analogowego i sterowanie wartością rezystancji za pomocą dwóch przycisków. Moduł zawiera wejścia przycisków UP/DOWN (do zwiększania i zmniejszania rezystancji) oraz wyprowadzenia zgodne z potencjometrem analogowym A, W, B (opis na płytce drukowanej). Modułowo MOD-19.Z
Brak towaru
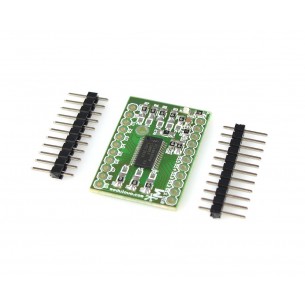
Moduł Xmega eXploreGO z mikrokontrolerem ATXmega128A4U (wersja bez MP3). Moduł wyposażony jest m.in. w pamięć DataFlash, złącze karty microSD. MOD-20/A.Z
Brak towaru
MOD-21.Z - moduł przycisku dotykowego o działaniu bistabilnym. Czujnik działa w oparciu o układ AT42QT1012.
Brak towaru
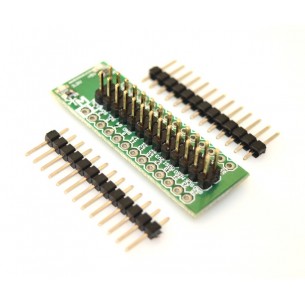
Adapter złącza GPIO platformy Raspberry Pi umożliwia wyprowadzenie sygnałów z Raspberry Pi na płytkę stykową. Dwie diody LED sygnalizują zasilanie +3.3 V i +5 V
Brak towaru
Brak towaru
MOD-25.Z - moduł przycisku dotykowego o działaniu monostabilnym. Czujnik działa w oparciu o układ AT42QT1011.
Brak towaru
Brak towaru
Brak towaru
Janusz Narkiewicz