- Obecnie brak na stanie








Pololu - 2276
99:1 Metal Gearmotor 25Dx54L mm HP with 48 CPR Encoder
This cylindrical, 2.62" x 0.98" x 0.98" gearmotor uses a brushed DC motor with extra-strong magnets and a 98.78:1 metal gearbox to deliver a lot of power in a relatively small package. It has an integrated 48 CPR quadrature encoder on the motor shaft, which provides 4741 counts per revolution of the gearbox’s output shaft. These units have a 0.315"-long, 4 mm-diameter D-shaped output shaft. We also carry a version of this gearmotor without an encoder.
Key specs at 6 V: 100 RPM and 450 mA free-run, 160 oz-in (11.5 kg-cm) and 6 A stall.
Overview
This brushed DC gearmotor is available in high- and low-power versions in a number of gear ratios. The motor and encoder portions are available by themselves (i.e. without the gearbox), and many other gear ratios are also available without an encoder.
These motors are intended for use at 6 V. In general, these kinds of motors can run at voltages above and below this nominal voltage, so they should comfortably operate in the 3 – 9 V range, though they can begin rotating at voltages as low as 1 V. Higher voltages could start negatively affecting the life of the motor.
Details for item #2276
Exact gear ratio: 22×22×22×22×22×23/12×10×10×10×10×10≈98.78:1
Gearmotor accessories
The face plate has two mounting holes threaded for M3 screws. You can use our custom-designed 25D mm metal gearmotor bracket (shown in the picture below) to mount the gearmotor to your project via these mounting holes and the screws that come with the bracket.
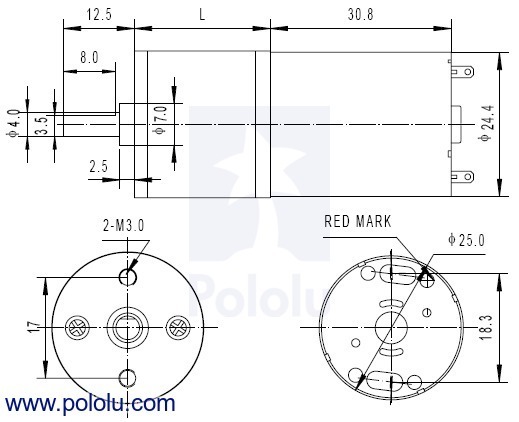
Dimensions
The diagram below shows the dimensions (in mm) of the 25D mm line of gearmotors. The value of L is shown in the table below.
Using the Encoder
A two-channel Hall effect encoder is used to sense the rotation of a magnetic disk on a rear protrusion of the motor shaft. The quadrature encoder provides a resolution of 48 counts per revolution of the motor shaft when counting both edges of both channels. To compute the counts per revolution of the gearbox output, multiply the gear ratio by 48. The motor/encoder has six color-coded, 11" (28 cm) leads terminated by a 1×6 female header with a 0.1″ pitch, as shown in the main product picture. This header works with standard 0.1″ male headers and our male jumper and precrimped wires. If this header is not convenient for your application, you can pull the crimped wires out of the header or cut the header off. The following table describes the wire functions:
| Color | Function |
| Red | motor power (connects to one motor terminal) |
| Black | motor power (connects to the other motor terminal) |
| Green | encoder GND |
| Blue | encoder Vcc (3.5 – 20 V) |
| Yellow | encoder A output |
| White | encoder B output |
The Hall sensor requires an input voltage, Vcc, between 3.5 and 20 V and draws a maximum of 10 mA. The A and B outputs are square waves from 0 V to Vcc approximately 90° out of phase. The frequency of the transitions tells you the speed of the motor, and the order of the transitions tells you the direction. The following oscilloscope capture shows the A and B (yellow and white) encoder outputs using a motor voltage of 6 V and a Hall sensor Vcc of 5 V:
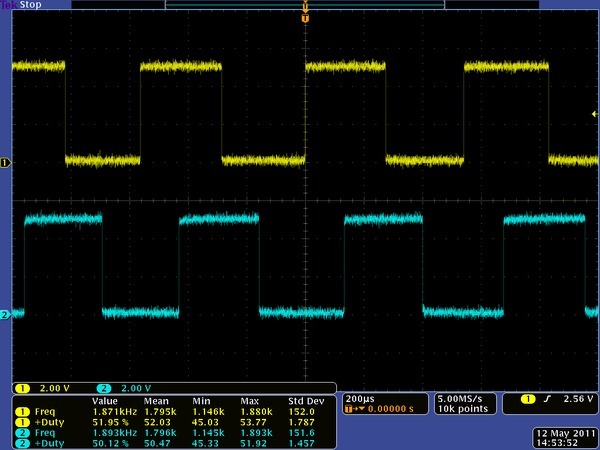
By counting both the rising and falling edges of both the A and B outputs, it is possible to get 48 counts per revolution of the motor shaft. Using just a single edge of one channel results in 12 counts per revolution of the motor shaft, so the frequency of the A output in the above oscilloscope capture is 12 times the motor rotation frequency.
Cechy
Producent BTC Korporacja sp. z o. o. Lwowska 5 05-120 Legionowo Polska sprzedaz@kamami.pl 22 767 36 20
Osoba odpowiedzialna BTC Korporacja sp. z o. o. Lwowska 5 05-120 Legionowo Polska sprzedaz@kamami.pl 22 767 36 20
Przejściówka, która pozwala łatwo zamontować koła na silnik z wałem o średnicy 4 mm za pomocą śrub o rozmiarze 4-40. Hub pasuje zarówno do wałów okrągłych jak i tych w kształcie litery D. Pololu 1081
Sześciokołowe mobilne podwozie robota przeznaczone do projektów wymagających jazdy po wymagającym terenie. Wykorzystuje sterownik oparty o ESP32 oraz zestaw czujników IMU. Może być łatwo rozbudowany o dodatkowe elementy np. ramię robotyczne, kamerę lub LIDAR. Waveshare UGV02 (EU)
Brak towaru
NUCLEO-F746ZG to płytka rozwojowa ze złączami ST Zio i ST morpho, bazująca na mikrokontrolerze STM32F746ZGT6. Dzięki wbudowanemu programatorowi zgodnemu z ST-Link/v2-1, możliwe jest programowanie oraz debugowanie mikrokontrolera przez złącze USB
Brak towaru
NUCLEO-F429ZI to płytka rozwojowa ze złączami ST Zio i ST morpho, bazująca na mikrokontrolerze STM32F429ZIT6. Dzięki wbudowanemu programatorowi zgodnemu z ST-Link/v2-1, możliwe jest programowanie oraz debugowanie mikrokontrolera przez złącze USB
Brak towaru
Dynamiczny tag NFC/RFID z układem ST25TA02K-P. Układ jest w pełni zasilany przez fale radiowe. Posiada wyjście GPO ogólnego przeznaczenia. CLOUDST25TA02K-P
Brak towaru
Silnik firmy Pololu z enkoderem 64 CPR, z przekładnią 50:1, standardowym napięciem pracy 12 V i prędkością 200 rpm. Pololu 2824
Brak towaru
Particle Photon to moduł IoT z mikrokontrolerem ARM (Cortex-M3) oraz modułem WiFi. Moduł ma wlutowane złącza goldpin 2,54 mm. SparkFun WRL-13774
Brak towaru
Komputer SBC z SoC Allwinner H8 (8-rdzeniowy Cortex-A7 2 GHz, PowerVR SGX544MP) wyposażony m.in. w pamięć RAM 2 GB, pamięć eMMC 8 GB, WiFi a/b/g/n, Bluetooth, interfejs SATA 2.0
Brak towaru
Obudowa do Banana Pi M3, M2 Ultra oraz M64 przezroczysta, wykonana z akrylu. Obudowa składana jest na zatrzaski bez użycia kleju. Odpowiednio przygotowane otwory pozwalają na korzystanie z wszystkich gniazd w jakie wyposażony jest Banana Pi M3
Brak towaru
Sieciowy zasilacz impulsowy 5V, 1A, kabel zakończony wtykiem mini-USB. DC/230V AC
Brak towaru
Genuino Arduino 101 to płytka z modułem Intel Curie (rdzeń x86 Intel Quark + ARC, 32 MHz). Płytka wyposażona jest w Bluetooth LE, akcelerometr i żyroskop
Brak towaru
Particle Photon to moduł IoT z mikrokontrolerem ARM (Cortex-M3) oraz modułem WiFi
Brak towaru
RoboClaw 2x7A Motor Controller (V5) to dwukanałowy sterownik silników prądu stałego (DC), napięcie pracy: 6..36 V, maksymalny prąd ciągły: 7,5 A, możliwość łatwej realizacjie pętli sprzężenia zwrotnego z regulatorem PID, systemy bezpieczeństwa. Pololu 2399
Brak towaru
4-kanałowy analizator stanów logicznych ScanaQuad o częstotliwości próbkowania 25 MHz, do 256000 próbek na kanał, napięcie wejściowe 0..5,5 V. ScanaQuad ma możliwość generowania przebiegów logicznych. Współpracuje z systemami Windows, OS X oraz Linux
Brak towaru
4-kanałowy analizator stanów logicznych ScanaQuad o częstotliwości próbkowania 50 MHz, do 1 milionów próbek na kanał, napięcie wejściowe ±15 V. ScanaQuad ma możliwość generowania przebiegów logicznych. Współpracuje z systemami Windows, OS X oraz Linux
Brak towaru
4-kanałowy analizator stanów logicznych ScanaQuad o częstotliwości próbkowania 100 MHz, do 2 milionów próbek na kanał, napięcie wejściowe ±15 V. ScanaQuad ma możliwość generowania przebiegów logicznych. Współpracuje z systemami Windows, OS X oraz Linux
Brak towaru
4-kanałowy analizator stanów logicznych ScanaQuad o częstotliwości próbkowania 200 MHz, do 4 milionów próbek na kanał, napięcie wejściowe ±15 V. ScanaQuad ma możliwość generowania przebiegów logicznych. Współpracuje z systemami Windows, OS X oraz Linux
Brak towaru
9-kanałowy analizator stanów logicznych ScanaPLUS o częstotliwości próbkowania 100 MHz, do 256000 próbek na kanał, napięcie wejściowe ±24 V. ScanaPLUS ma możliwość generowania przebiegów logicznych. Współpracuje z systemami Windows, OS X oraz Linux
Brak towaru
Pololu - 2276