- Obecnie brak na stanie









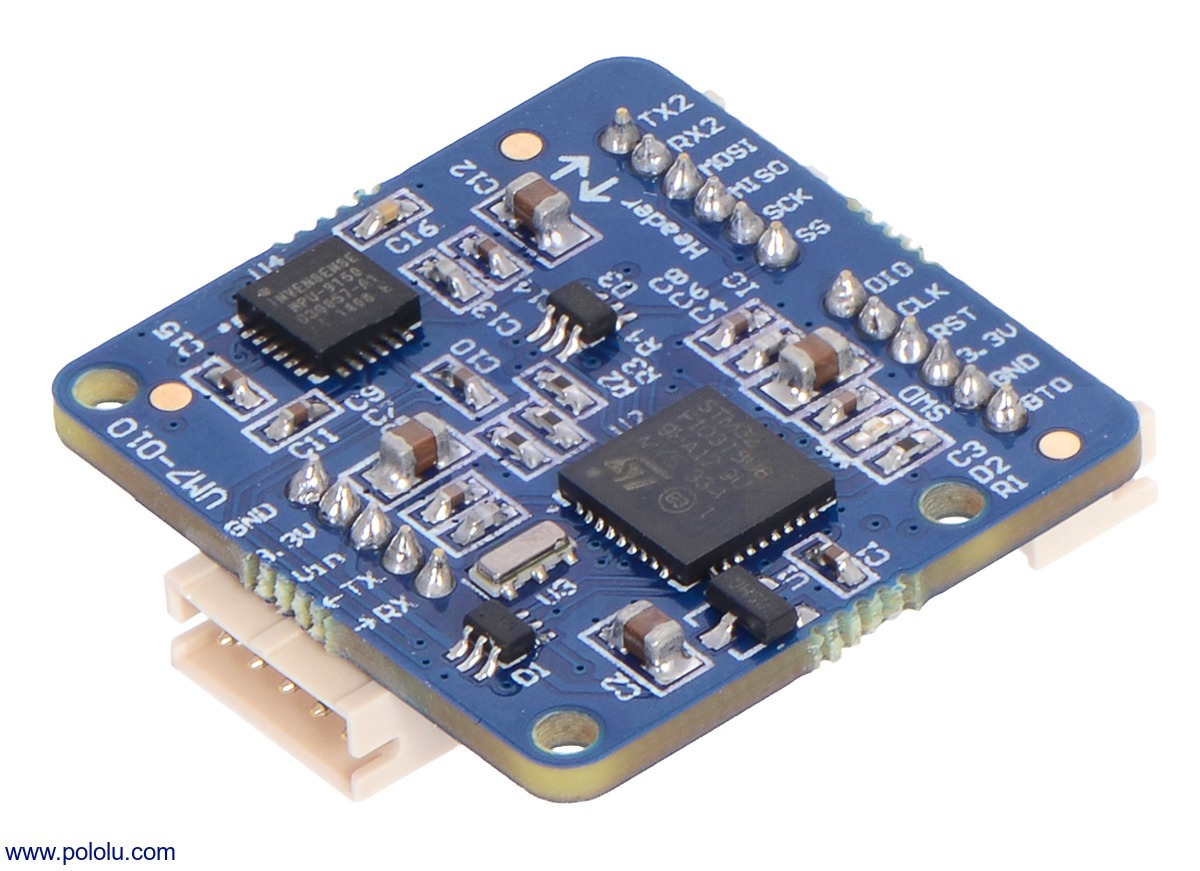
Moduł orientacji UM7 jest systemem odniesienia położenia i kursu (AHRS), posiadającym akcelerometr, żyroskop i magnetometr; dane są łączone przy pomocy rozszerzonego filtru Kalmana, na wyjściu otrzymywane są estymaty polożenia i kursu. Pololu - 2741
Overview
The UM7 orientation sensor is a third-generation Attitude and Heading Reference System (AHRS) from CH Robotics that produces attitude and heading estimates from triaxial accelerometer, rate gyro, and magnetometer data. Unlike a typical inertial measurement unit (IMU), which only provides raw sensor readings, the UM7 features an onboard microcontroller that combines sensor data using a sophisticated Extended Kalman Filter (EKF) to generate orientation estimates 500 times a second.
Two versions of the UM7 are available: the UM7 orientation sensor, which includes an enclosure, and the UM7-LT, which does not. The two versions are functionally equivalent, and both include a cable (even though it is only shown in one of the two pictures below).

UM7 orientation sensor.
UM7-LT orientation sensor.
The UM7 features a number of improvements over its predecessor, the UM6, including higher gyro bias stability and lower noise, a new communication architecture for improved flexibility, optional NMEA packet transmission, UTC time-synchronization with external GPS, and support for third-order temperature compensation on all sensors. It takes advantage of newer MEMS (micro-electro-mechanical systems) technology that allows it to offer better performance at a lower price.
Connections for power and TTL serial communication can be made to the UM7 through a polarized five-pin male connector on one side, which mates with an included cable assembly. A pair of six-pin expansion headers on the other side of the board provide additional connectivity options, including an alternative SPI interface and a secondary serial interface that can be connected to an external GPS module (like our LS20031 GPS receiver). Additional cable assemblies for the expansion headers are not included.
Details for item #2741

UM7 orientation sensor with included cable and U.S. quarter for size reference.
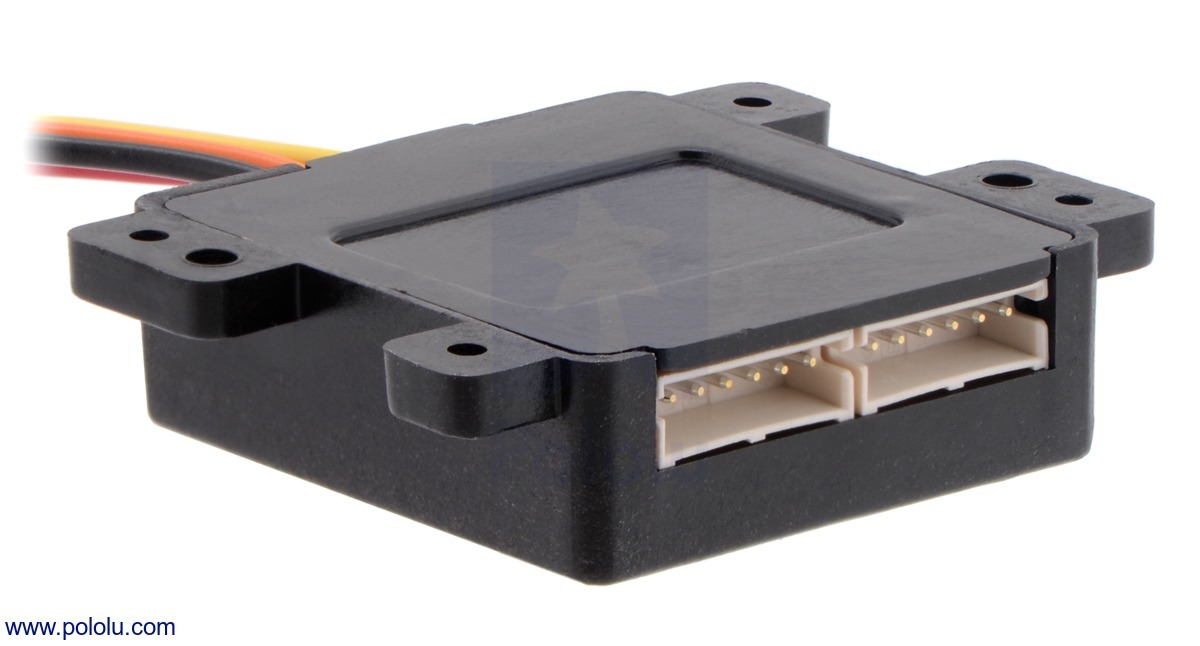
UM7 orientation sensor, bottom view showing optional expansion headers.
Product Comparison
We carry several inertial measurement and orientation sensors. The table below compares their capabilities:
| Product Name | Sensors | Estimation | Other | ||||||
|---|---|---|---|---|---|---|---|---|---|
| Gyros (3x) | Accels (3x) | Mag (3x) | Altitude | Roll | Pitch | Yaw | Quaternion | Enclosure | |
| Pololu MinIMU-9 v3 | YES | YES | YES | ||||||
| Pololu AltIMU-10 v4 | YES | YES | YES | YES | |||||
| CH Robotics UM7-LT Orientation Sensor | YES | YES | YES | YES | YES | YES | YES | ||
| CH Robotics UM7 Orientation Sensor | YES | YES | YES | YES | YES | YES | YES | YES | |
Features
Sensors and processing
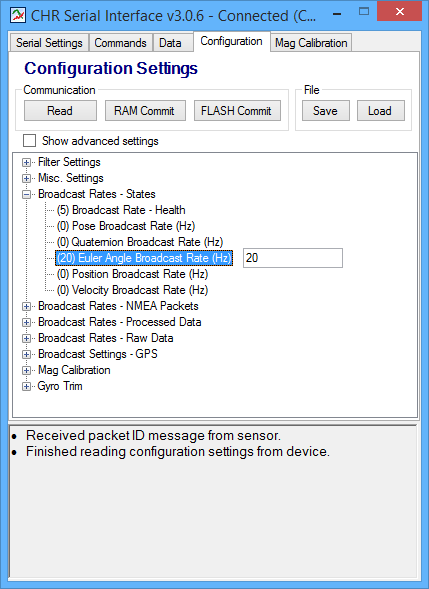
CHR Serial Interface.
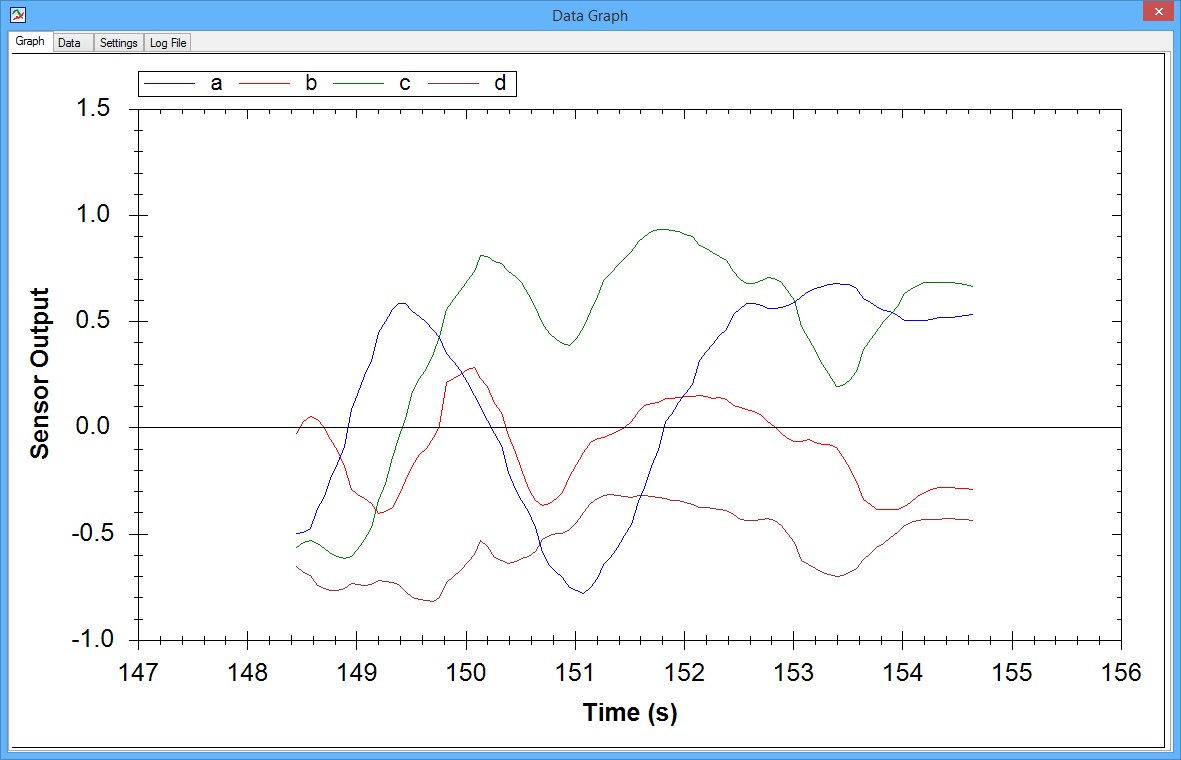
Graph of quaternions displayed by the CHR Serial Interface connected to a UM7/UM7-LT orientation sensor.
Communication
Specifications
Attitude and heading
Videos
In this video playlist, Caleb Chamberlain from CH Robotics shows how to get started with the UM7, configure its communication settings, and calibrate its magnetometer.
Specification
Dimensions
| Size: | 1.09″ × 1.12″ × 0.37″1 |
|---|---|
| Weight: | 7.5 g2 |
General specifications
| Interface: | TTL serial, SPI |
|---|---|
| Minimum operating voltage: | 4 V |
| Maximum operating voltage: | 5.5 V |
| Maximum logic voltage: | 3.3 V3 |
| Axes: | pitch (x), roll (y), and yaw (z) |
| Measurement range: | ±2000°/s (gyro) ±8 g (accelerometer) ±12 gauss (magnetometer) |
| Supply current: | 50 mA |
| Case/enclosure: | Y |
Notes:
Resources
File downloads
CHR Serial Interface.
Graph of quaternions displayed by the CHR Serial Interface connected to a UM7/UM7-LT orientation sensor.
(This software is open-source; CH Robotics will provide the source code upon request.)
Producent BTC Korporacja sp. z o. o. Lwowska 5 05-120 Legionowo Polska sprzedaz@kamami.pl 22 767 36 20
Osoba odpowiedzialna BTC Korporacja sp. z o. o. Lwowska 5 05-120 Legionowo Polska sprzedaz@kamami.pl 22 767 36 20
Zestaw do budowy robota psa sterowanego przewodowo za pomocą przełacznika. Totem TKR-DG
Brak towaru
Zestaw do budowy robota żyrafy sterowanego przewodowo za pomocą przełacznika. Totem TKR-GRF
Brak towaru
Zestaw do budowy robota dinozaura sterowanego przewodowo za pomocą przełacznika. Totem TKR-TRX
Brak towaru
Zestaw do budowy robota kroczącego sterowanego za pomocą aplikacji mobilnej i programowanego za pomocą Arduino IDE. Totem TKR-LSP
Brak towaru
Moduł wyzwalacza przeznaczony do ładowarek PD 2.0 i PD 3.0. Wyposażony został w wejście USB typu C i wyjście w postaci padów. Umożliwia zasilanie urządzeń napięciem 9 V lub 12 V oraz testowanie ładowarek. PDC005
Brak towaru
Zestaw rozwojowy z mikrokontrolerem RP2040 wyposażonym w dwa rdzenie ARM Cortex-M0+, które pracują z częstotliwością 133 MHz, 264 kB RAM. Na płytce znajduje się kamera QVGA, wyświetlacz LCD oraz układ IMU i mikrofon. ArduCAM B0302
Brak towaru
Moduł kamery o rozdzielczości 13 MP wyposażony w sensor obrazu AR1335. Wyposażony został w obiektyw o FoV 50° z mocowaniem typu M12. Przaeznaczony dla Raspberry Pi i Jetson Nano. ArduCAM B0277
Brak towaru
Sterownik robotów dedykowany do zestawów Totem. Bazuje na układzie ESP32 (moduł WiFi i Bluetooth), wyposażony został w sterownik silników DC i serw, diody RGB i czujnik IMU. Totem TE-X4-KIT1
Brak towaru
Sterownik robotów dedykowany do zestawów Totem. Wyposażony został w komunikację Bluetooth, dzięki czemu może być sterowany za pomocą smartfona. Totem TMK-X3K
Brak towaru
Taśma termoprzewodząca stosowana jako zastępstwo dla pasty termoprzewodzącej. Jest bardzo elastyczna i charakteryzuje się wysoką ściśliwością. AG Termopasty ART.AGT-161
Brak towaru
Akumulator Li-Po o napięciu znamionowym 3,7 V i pojemności 1350 mAh, wyposażony w zabezpieczenie PCM oraz złącze JST-ZH. Akyga LP503758
Brak towaru
Moduł z 3-osiowym akcelerometrem MMA8452Q. Układ ma konfigurowaną skalę pomiarową ±2g/±4g/±8g. Zasilany jest napięciem od 1,95 do 3,3 V i komunikuje się przez interfejs I2C. SparkFun SEN-12756
Brak towaru
Zewnętrzna obudowa przeznaczona do ochrony, przenoszenia i przechowywania danych na dyskach 2.5” HDD oraz SSD SATA. Podłączona jest do komputera przez złącze microUSB 3.0. UGO UKZ-1531
Brak towaru
Dysk SSD Hynix o pojemności 128 GB. Wyposażony został w interfejs NVMe PCIe 3.0 ze złączem M.2 B&M Key. Hynix HFM128GDHTNG-8310A
Brak towaru
Dysk SSD Samsung 980 o pojemności 250 GB. Wyposażony został w interfejs NVMe PCIe 3.0 x4 ze złączem M.2 M Key. Samsung MZ-V8V250BW
Brak towaru
Zewnętrzna obudowa przeznaczona do ochrony, przenoszenia i przechowywania danych na dyskach M.2 SSD z interfejsem SATA. GEMBIRD EE2280-U3C-01
Brak towaru
Moduł orientacji UM7 jest systemem odniesienia położenia i kursu (AHRS), posiadającym akcelerometr, żyroskop i magnetometr; dane są łączone przy pomocy rozszerzonego filtru Kalmana, na wyjściu otrzymywane są estymaty polożenia i kursu. Pololu - 2741