- Obecnie brak na stanie
")
")
")

Sterownik może sterować dwoma silnikami szczotkowymi, komunikując się z układem nadrzędnym przy pomocy USB Micro-B, interfejsu szeregowego TTL, sygnałów analogowych, a także sygnałów z aparatury RC. Wydajność prądowa 5A/kanał pozwala na sterowanie silnikami dużej mocy. Pololu 2394
Sterownik Roboclaw ma dwa synchroniczne kanały zasilające dwa silniki szczotkowe prądem stałym 5A i napięciem od 6 do 34V oraz pozwala na podwyższenie prądów do dwukrotnej maksymalnej wartości znamionowej. Sterownik ma procedurę PID umożliwiającą sterowanie w zamkniętej pętli, podtrzymywanie prędkości silnika przy zmiennym obciążeniu. Odczyt zliczeń i prędkości dekodera może być dokonywany bezpośrednio ze sterownika i wysyłany do zewnętrznego kontrolera. RoboClaw może być kontrolowany przez wiele zewnętrznych układów nadrzędnych: komputer przy użyciu interfejsu USB, system wbudowany przy użyciu interfejsu TTL, kontroler RC do zastosowania sterownika jako ESC lub może być się komunikować poprzez sygnały analogowe wytwarzane przez joysticki lub potencjometry.
Producent BTC Korporacja sp. z o. o. Lwowska 5 05-120 Legionowo Polska sprzedaz@kamami.pl 22 767 36 20
Osoba odpowiedzialna BTC Korporacja sp. z o. o. Lwowska 5 05-120 Legionowo Polska sprzedaz@kamami.pl 22 767 36 20
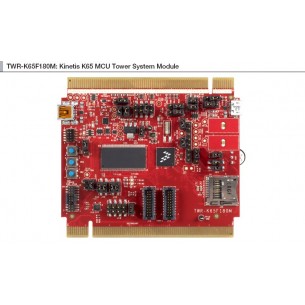
Zestaw rozwojowy oparty na 32-bitowym mikrokontrolerze Arm Cortex-M4 o częstotliwości taktowania 180 MHz . Moduł ma wbudowaną pamięć 2MB Flash, 256 KB SRAM, kontroler SDRAM, HS USB i Ethernet MAC. TWR-K65F180M
Brak towaru
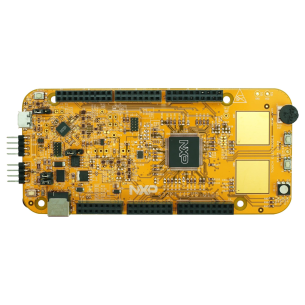
FRDM-K28F jest płytą rozwojową dla mikrokontrolerów Kinetis na bazie ARM Cortex-M4 z licznymi peryferiami m.in. 6-osiowy akcelerometr cyfrowy i magnetometr, interfejs USB, gniazdo kart microSD, trójkolorową diodę LED i dwa przyciski użytkownika. FRDM-K28F
Brak towaru
S32K144EVB-Q100X to zaawansowana płyta rozwojowa od NXP Semiconductors, oparta na mikrokontrolerze ARM Cortex-M4, idealna do prototypowania aplikacji wbudowanych w motoryzacji i przemyśle. Obsługuje interfejsy komunikacyjne takie jak CAN, LIN, SPI, I2C oraz UART, a dzięki różnorodnym złączom i kompatybilności z narzędziami programistycznymi NXP, umożliwia łatwą integrację i tworzenie aplikacji czasu rzeczywistego.
Brak towaru
X-MCIMX8M-EVK to zestaw ewaluacyjny z procesorem i.MX 8MQuad (4 rdzenie ARM Cortex-A53 (pracujące z częstotliwością 1,5 GHz) oraz rdzeń ARM Cortex-M4 (pracujący z częstotliwością 266 MHz)). Układ ten posiada 1 MB pamięci L2 cache. Do dyspozycji jest 4 GB pamięci LPDDR4, 16 GB pamięć eMMC 5.0, 256 Mb pamięci QSPI oraz slot na karty pamięci microSD.
Brak towaru
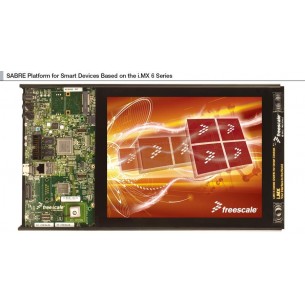
MCIMX6DL-SDP to zestaw ewaluacyjny firmy NXP z procesorem i.MX 6Quad Arm Cortex-A9 1 GHz, 1 GB pamięci SDRAM oraz złącze USB OTG, HDMI, złącze Ethernet oraz slot na kartę SD. Posiada wbudowany wyświetlacz LVDS. MCIMX6DL-SDP
Brak towaru
Płytka drukowana i zaprogramowany układ do karty przekaźników programowanej sekwencjami. AVT1998 A+
Brak towaru
Zestaw AVT do samodzielnego montażu karte przekaźników programowanej sekwencjami. AVT1998 B
Brak towaru
Zmontowana karta przekaźników programowana sekwencjami. AVT1998 C
Brak towaru
Brak towaru
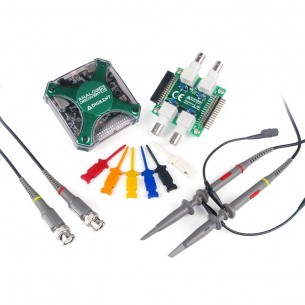
Rozbudowany zestaw do analizy sygnałów zawierający przystawkę Analog Discovery 2, adapter Analog Discovery BNC, sondy BNC oraz niezbędne akcesoria. Digilent 240-123
Brak towaru
Taśma w formie plecionki przeznaczona do usuwania nadmiaru roztopionego spoiwa lutowniczego. Szerokość 1,9 mm, długość 15 m. CHEMTRONICS HQ-WICK-L5
Brak towaru
Płytka ZYBO Z7 (Zynq Board) to odnowiona wersja zestawu zawierającego układ programowalny z rodziny Xilinx Zynq-7000 - Z-7020. W zestawie także Voucher Xilinx Zynq SDSoC. Wersja edukacyjna. Digilent 471-015
Brak towaru
SIM7600CE 4G HAT jest modułem rozszerzającym możliwości Raspberry Pi o komunikację za pośrednictwem sieci komórkowych GSM/GPRS oparty o układ SIM7600CE firmy Simcom. Posiada obsługę 4G/3G/2G/GSM/GPRS/GNSS. Waveshare SIM7600CE 4G HAT
Brak towaru
SIM7600E-H 4G HAT jest modułem rozszerzającym dla Raspberry Pi o komunikację za pośrednictwem sieci komórkowych GSM/GPRS oparty o układ SIM7600E-H firmy Simcom. Waveshare SIM7600E 4G HAT
Brak towaru
Ładowarka indukcyjna Akyga pozwala naładować smartfon bezprzewodowo przy użyciu indukcji. Technologia QI zapewnia jej kompatybilność z większością popularnych smartfonów dostępnych na rynku. Napięcie wyjściowe 5 V, wydajność prądowa to 1A. Akyga AK-QI-01
Brak towaru
Uniwersalna ładowarka samochodowa USB Akyga zasilana z gniazda zapalniczki samochodowej. Napięcie zasilającej 12/24V, napięcie wyjściowe 5V/1A. Akyga AK-CH-01
Brak towaru
Sterownik może sterować dwoma silnikami szczotkowymi, komunikując się z układem nadrzędnym przy pomocy USB Micro-B, interfejsu szeregowego TTL, sygnałów analogowych, a także sygnałów z aparatury RC. Wydajność prądowa 5A/kanał pozwala na sterowanie silnikami dużej mocy. Pololu 2394