











- Obecnie brak na stanie





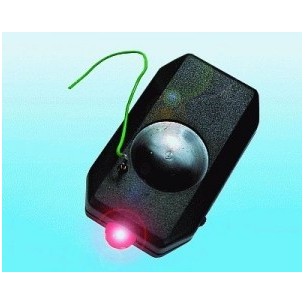
Sensor pozwala na ulepszenie chwytaka robota o zdolność wyczuwania obiektu chytanego - dzięki czemu robot będzie mógł w odpowiednim momencie ograniczyć siłę nacisku szczęk, nie uszkadzając chwytanego obiektu. SPX-14200
Sensor pozwala na ulepszenie chwytaka robota o zdolność wyczuwania obiektu chytanego - dzięki czemu robot będzie mógł w odpowiednim momencie ograniczyć siłę nacisku szczęk, nie uszkadzając chwytanego obiektu. Dzięki temu ramie robota będzie mogło chwycić bez uszkodzenia np. kubek plastikowy, kurze jajko czy inny, kruchy przedmiot.
Czujnik działa w oparciu o sensor odlełgości VCNL4040 i specjalnie zaprojektowany przeźroczysty element, mający kontakt z chwytanym obiektem. W momencie zetknięcia, czujnik odnotowuje nagły wzrost poziomu promieniowania podczerwonego (emitowanego przez wbudowaną diodę IR) - sygnał ten można wykorzystać do ograniczenia siły zaciśnięcia szczęk chytaka (np. poprzez wyłączenie silników napędowych). Przykładowe oprogramowanie Arduino (dostępne w sekcji "Do pobrania" na dole strony) pokazuje, w jaki sposób rozpoznawane jest "złapanie" oraz "puszczenie" obiektu.
Czujnik zasilany jest napięciem 3,3 V i wykorzystuje magistralę I2C.
Uwaga!
Moduł ma wbudowane rezystory podciągające na liniach magistrali I2C. Nie należy wymuszać na tych liniach napięcia wyższego, niż 3,3 V
Producent BTC Korporacja sp. z o. o. Lwowska 5 05-120 Legionowo Polska sprzedaz@kamami.pl 22 767 36 20
Osoba odpowiedzialna BTC Korporacja sp. z o. o. Lwowska 5 05-120 Legionowo Polska sprzedaz@kamami.pl 22 767 36 20
8-bitowy dwukierunkowy konwerter poziomów napięć z układem ST2378 firmy STMicroelectronics, 13 Mb/s, 1,8-5,5 V
Płytka wyposażona w mikrokontroler Atmel ATmega328 z rodziny AVR, do dyspozycji użytkownika jest 14 linii I/O, 6 kanałów PWM, 6 wejść analogowych. Dodatkowy mikrokontroler ATmega16U4 realizuje komunikację przez interfejs USB
Mechanizm chwytaka do manipulatora o maksymalnym rozstawie szczęk 54 mm. DFRobot FIT0300
Miniaturowy chwytak pasujący do wszystkich sub-micro serwomechanizmów. Sparkfun Rob-13177
Brak towaru
Brak towaru
Pololu RP5/Rover 5 Expansion Plate RRC07A (Narrow) Transparent Gray
Brak towaru
Kabel sieciowy Ethernet Patchcord UTP 5E o długości 2 m - szary, ze złączami 2xRJ45
Brak towaru
STEROWNIK UNIPOLARNEGO SILNIKA KROKOWEGO - PŁYTKA DRUKOWANA I ZAPROGRAMOWANY UKŁAD
Brak towaru
Brak towaru
Monitor o przekątnej 9,7" z ekranem e-Paper wyposażony w interfejs mini HDMI. Oferuje rozdzielczość 1200×825 pikseli, szeroki kąt widzenia oraz niski pobór energii. Waveshare EINK-DISP-97 (EU)
Brak towaru
Moduł rozszerzeń przeznaczony do współpracy z Raspberry Pi 400. Na płytce wyprowadzono dwa złącza 40-pinowe umieszczone w pozycji pionowej oraz złącze do RPI 400 pod kątem 45°. Waveshare PI400-GPIO-ADAPTER-C
Brak towaru
PCB i zaprogramowany układ do zdalnie sterowanego przełącznika z dwoma przekaźnikami. AVT5551 A+
Brak towaru
Brak towaru
Książka "Mikrokontrolery AVR ATmega w praktyce" + zestaw ZL3AVR + programator ZL2PRG
Brak towaru
Płytka bazowa dla rodziny modułów SpaceSOM-8Mplus. Wraz z modułem SoM tworzy kompletną platformę programistyczną podobną do SBC. SoMLabs SpaceCB-8Mplus-ADV v.1.1
Brak towaru
Brak towaru
Wyświetlacz LCD 2x16, 80x36mm, LED backlight (GREEN), znak 4,24mm
Brak towaru
Brak towaru
Brak towaru
Sensor pozwala na ulepszenie chwytaka robota o zdolność wyczuwania obiektu chytanego - dzięki czemu robot będzie mógł w odpowiednim momencie ograniczyć siłę nacisku szczęk, nie uszkadzając chwytanego obiektu. SPX-14200